Hello John
Rob was referring to me, so here are the details of what I am experiencing:
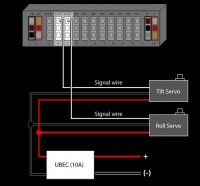
1. I am using a Futaba 8FG Rx and S-BUS communication to the Rx
2. I am have assigned CH7 to the Pitch control using one of the Tx dials (CH8 is assigned to Roll control using another Tx dial)
3. I am using the latest FW from ZeroUAV, so Roll can no longer be controlled by the Tx (unless you setup the GCS into 'Settings' mode, in which case the CH7 Tx dial then controls Roll and not Pitch)
4. When I follow the instructions shown on the ZeroUAV gimbal calibration video I get some rather odd effects:
- I change the aircraft mode to '6' in the parameters
- Roll PTZ sensitivity is set to 50 (factory default)
- Pitch PTZ sensitivity is set to 40 (factory default)
- I then power up the servos and imediately the gimbal slaps against the back RHS of the frame under the GPS/compass. It then moves from left to right (all the while pressing hard against the back of the frame)
- At this stage I disconnect the power to the servoes in fear of damaging them
- I cannot get to the capture of Pitch and Roll extents and I then set the aircraft mode back to '2'
5. I then power of the AP and restart the GCS software (if I don't do this then the gimbal issue in point 4 persists)
6. I now don't press 'Stedicam Alignment' in the GCS software and power up the servos.
7. The gimbal aligns more or less vertical, but is slightly off vertical in the roll axis
8. I new select 'Settings' mode in the GCS software and use the Tx CH7 dial to get the gimbal into vertical alignment in the Roll direction (the ZeroUAV support guy told me about this little trick). Once done I 'Quit Setting" mode.
9. At this stage if I move the aircraft frame in the Pitch direction (front-back) the gimbal stays vertical
10. If I roll the aircraft frame in the Roll axis (left-right) then the gimbal goes off vertical and aligns with the aircraft frame (i.e. staying at 90 degree to the frame) and not vertical. there is also a notable wobble in the gimbal in the Roll direction.
11. I now try increasing and decreasing the Roll PTZ sensitivity parameter. Decreasing has a 'slackening' effect and the gimbal sways around in the roll axis. Increasing the parameter increases the tension in the Roll axis, but has the effect of moving the gimbal off vertical (I then have to repeat point 7 again). Neither increasing or decreasing the Roll PTZ parameter value has any effect on keeping the gimbal vertical when the aircraft frame is moved form side-to-side and it keeps aligning close to 90 degrees with respect to the aircraft frame.
So, the Pitch control of the gimbal is good, but I have no idea how to get the Roll axis to behave itself (i.e stay in vertical alignment).
Any ideas?
Julian
")