I looked through the flight log to see if I could have reversed the attitude gain setting, but I couldn't find anything in the flight log that seemed to show the attitude or secondary gain setting. I'm assuming that the positive setting on the transmitter is the plus gain. Wondering if I could have the gain reversed, I tried to reverse the setting on that control and tried a quick lift off, but it just wanted to tip over.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
XAircraft SuperX on heavy lifter
- Thread starter octocine
- Start date
kloner
Aerial DP
the last flights when you barely powered up then back down still shows octo, you have to change it in the gui to quad.....
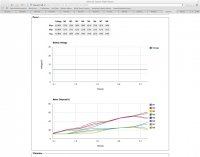
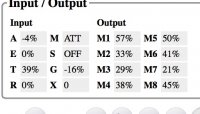
for sure your motors on the octo are not level, nothing to watch, see the varying motor outputs, 90-50-90-50-90-50-90-50
View attachment 17366
for sure your motors on the octo are not level, nothing to watch, see the varying motor outputs, 90-50-90-50-90-50-90-50
View attachment 17366
Attachments
kloner
Aerial DP
your gain is -16 in the last attempts, it is letter G, none the less your gonna want to make sure the quad is enabled first,,,,
View attachment 17367
View attachment 17367
Attachments
Motopreserve
Drone Enthusiast
I was having the same issues with wrapping my head around how the gains worked. Like you, I assumed that the software was "tuning" and the rotary knob was "fine tuning." But as Kloner describes is the more appropriate way to think of it (and how it actually effects the craft).
Also, just a heads up: in trying to figure out all this, Anthony from Xaircraft (very quick responses and helpful) mentioned that Taranis (could be other brands too) often don't equate what superx thinks of as zero and maximum additive/reduction to the atti gain. So for instance on a rotary knob, center might be -6, full left might be -30, full right might be +106. You can adjust this within the Tx with sub-trims to get the throw correct, and that it lines up with what the SuperX wants to see. My Futaba is definitely off, and needs to be calibrated with the aux channel send.
You should be able to check this by powering up and running the gamut on the rotary knob, and then checking it against the G channel section of the log. To make life easier, you can delete the last log you ave in your SuperX when mounted as a hard drive from the log folder - that way the next round of tests will only show your latest flights/take-offs. Makes life easier. And you can rename the file as well for backup (black box will still recognize it).... makes life MUCH easier.")
Good luck.
Also, just a heads up: in trying to figure out all this, Anthony from Xaircraft (very quick responses and helpful) mentioned that Taranis (could be other brands too) often don't equate what superx thinks of as zero and maximum additive/reduction to the atti gain. So for instance on a rotary knob, center might be -6, full left might be -30, full right might be +106. You can adjust this within the Tx with sub-trims to get the throw correct, and that it lines up with what the SuperX wants to see. My Futaba is definitely off, and needs to be calibrated with the aux channel send.
Out of interest - are you possibly flying with a Taranis radio? Another customer was having issues with his remote gains always starting at -18% and it ended up being a slight glitch within the remote. Basically the Taranis' idea of centre was different to SuperX and he had to add slight sub-trim (4.5 I think) to get it to start at zero.
You should be able to check this by powering up and running the gamut on the rotary knob, and then checking it against the G channel section of the log. To make life easier, you can delete the last log you ave in your SuperX when mounted as a hard drive from the log folder - that way the next round of tests will only show your latest flights/take-offs. Makes life easier. And you can rename the file as well for backup (black box will still recognize it).... makes life MUCH easier.
Good luck.
Well things are looking somewhat better. I reloaded the firmware and the software (just in case), re did all of the calibrations and leveled the motors as Kloner suggested, set the primary gain at .9 and started the secondary gain at 80 on the DX8 and reversed the channel as Cedar suggested (it's unfortunate that I could not tell that I was actually in negative gain until I flew with it in negative territory and read the black box data.
It flew reasonably well, so I tried lots of different gain settings and ended up liking a primary gain of .9 and attitude gain of 140 when it was calm (DX8 range is from -150 to 150). I flew it quite a bit with weights and then the camera (Blackmagic 4k). With a little wind I ended up backing off the attitude gain to 125 since it seemed a bit twitchy. It seemed to fly very similar to a primary gain of 104/5 with attitude gain at +20 for what it's worth.
I have to say that this setup did not feel good in wind gusts - a bit alarming actually. I'm still disappointed/worried about the take offs. It acts like it might flip, but then levels out reasonably well. It's definitely not a reassuring takeoff in either GPS or atti mode.
There's still quite a bit of wobble in the footage, but I don't know that I can blame that on the flight controller. The Blackmagic is a big bulky camera and it may be catching some prop wash. I was hoping to use 450mm booms, but think I might have to try longer booms. If that doesn't work I may try it as a flat 8. It's flying and the footage is usable if heavily stabilized, but so far I would not recommend anyone else go this route. I might try to put my smaller gimbal on it that works really well on a flat 8 to see how much of the wobble is from a camera mount problem or if it's something with the flight control or how I've set up.
Thanks all for the help - It's greatly appreciated!
It flew reasonably well, so I tried lots of different gain settings and ended up liking a primary gain of .9 and attitude gain of 140 when it was calm (DX8 range is from -150 to 150). I flew it quite a bit with weights and then the camera (Blackmagic 4k). With a little wind I ended up backing off the attitude gain to 125 since it seemed a bit twitchy. It seemed to fly very similar to a primary gain of 104/5 with attitude gain at +20 for what it's worth.
I have to say that this setup did not feel good in wind gusts - a bit alarming actually. I'm still disappointed/worried about the take offs. It acts like it might flip, but then levels out reasonably well. It's definitely not a reassuring takeoff in either GPS or atti mode.
There's still quite a bit of wobble in the footage, but I don't know that I can blame that on the flight controller. The Blackmagic is a big bulky camera and it may be catching some prop wash. I was hoping to use 450mm booms, but think I might have to try longer booms. If that doesn't work I may try it as a flat 8. It's flying and the footage is usable if heavily stabilized, but so far I would not recommend anyone else go this route. I might try to put my smaller gimbal on it that works really well on a flat 8 to see how much of the wobble is from a camera mount problem or if it's something with the flight control or how I've set up.
Thanks all for the help - It's greatly appreciated!
Beauregard
Member
Its in wind gust that I was seeing some radical yaw shifts. Accompanied by some odd wobble that would raise the hair on your neck..
I had noticeable yaw twitching in GPS mode in calm air. It was pretty good in Attitude mode. I dropped the gain to .8 for yaw, but the twitch is still there in GPS mode. Anyone know if the yaw gain works differently in the different modes? The altitude hold seemed pretty loose to me. At a gain of 1 it would drop down about 12 feet when going from a hover to forward flight. I edged up the AH gain to 1.2 but it still seemed loose to me. I'm a little leary about moving gains too far from the default, not knowing really what to expect.
X650Mouse
Take no prisoners
I had noticeable yaw twitching in GPS mode in calm air. It was pretty good in Attitude mode. I dropped the gain to .8 for yaw, but the twitch is still there in GPS mode. Anyone know if the yaw gain works differently in the different modes? The altitude hold seemed pretty loose to me. At a gain of 1 it would drop down about 12 feet when going from a hover to forward flight. I edged up the AH gain to 1.2 but it still seemed loose to me. I'm a little leary about moving gains too far from the default, not knowing really what to expect.
Gains affect the sensitivity of the accelerometer and Gyro only, in GPS hold mode there is constant activity as the GPS makes micro movements to stay on station, this can be seen especially when there is wind present, you are much better to do your analysis using Attitude hold or better still Manual mode, both these modes are using Acc and Gyro less.
David
yeehaanow
Member
Have you calibrated the ESC's? One time I calibrated one, and forgot the other three, and the log showed a difference in motor power of about 20% on that one motor.
I have practically the same setup, and flying the same camera, but mine has been flying really well with similar gains to yours. I'm using 400kv motors and the APC 16" multirotor props. Those props are very heavy and have a lot of inertia. Might be part of the secret sauce. ??
I have practically the same setup, and flying the same camera, but mine has been flying really well with similar gains to yours. I'm using 400kv motors and the APC 16" multirotor props. Those props are very heavy and have a lot of inertia. Might be part of the secret sauce. ??
Gains affect the sensitivity of the accelerometer and Gyro only, in GPS hold mode there is constant activity as the GPS makes micro movements to stay on station, this can be seen especially when there is wind present, you are much better to do your analysis using Attitude hold or better still Manual mode, both these modes are using Acc and Gyro less.
David
Good to know. It makes sense that GPS mode would be twitchy in wind, but it would seem that only changes in elevator and aileron would be needed to hold position. I don't understand why rudder is needed to hold position. A gimbal cam remove the roll and pitch motion, but I fly with a two axis, single operator system, so those yaw twitches are a problem for the footage. It's not a big deal since I don't anticipate a lot of GPS flying, but it would be nice to find a way to lose that yaw twitch, if possible. I've got to get the nerve to try manual mode.
Have you calibrated the ESC's? One time I calibrated one, and forgot the other three, and the log showed a difference in motor power of about 20% on that one motor.
I have practically the same setup, and flying the same camera, but mine has been flying really well with similar gains to yours. I'm using 400kv motors and the APC 16" multirotor props. Those props are very heavy and have a lot of inertia. Might be part of the secret sauce. ??
Thanks, I have calibrated the ESCs. I'm using the 16" APC props also. Thought I'd start with them because the price is right and I've been known to tip over a few times before I get things sorted out.
The good news is that on the last flight of the day I completely reconfigured the two axis gimbal and got much of the wobble out of the shots. The footage is almost usable without stabilization now, so that's exciting.
X650Mouse
Take no prisoners
Good to know. It makes sense that GPS mode would be twitchy in wind, but it would seem that only changes in elevator and aileron would be needed to hold position. I don't understand why rudder is needed to hold position.
If you think about it you will understand that GPS Hold is 3 dimensional! it must be, otherwise it is not holding position if it is spinning in a circle!
David
Motopreserve
Drone Enthusiast
If you think about it you will understand that GPS Hold is 3 dimensional! it must be, otherwise it is not holding position if it is spinning in a circle!
David
+1. And unfortunately, at least here in Vermont - the wind is DEFINITELY 3D!
David, would you suggest doing all tuning in manual mode? I know that the best tuning for multiwii came from doing it in ACRO mode - before ever switching over to any type of leveling or self-adjustment mode. Not sure if it would be more effective here to get the software dialed in based on the manual mode - and then you have rotary knob for the other flight modes.
Thanks
Last edited by a moderator:
X650Mouse
Take no prisoners
+1. And unfortunately, at least here in Vermont - the wind is DEFINITELY 3D!
David, would you suggest doing all tuning in manual mode? I know that the best tuning for multiwii came from doing it in ACRO mode - before ever switching over to any type of leveling or self-adjustment mode. Not sure if it would be more effective here to get the software dialed in based on the manual mode - and then you have rotary knob for the other flight modes.
Thanks
I can't say either way, I think yes to manual but I don't have the skill to do it, and the environment would need to be dead calm as trying to dial in gains at the same time trying to keep the vehicle steady with 2 sticks would be a nightmare, I know the problem but I am no where near putting forward a solution.... Sorry
David
Last edited by a moderator:
Motopreserve
Drone Enthusiast
I can't say either way, I think yes to manual but I don't have the skill to do it, and the environment would need to be dead calm as trying to dial in gains at the same time trying to keep the vehicle steady with 2 sticks would be a nightmare, I now the problem but I am no where near putting forward a solution.... Sorry
David
Thanks David. I'm thinking I might try tuning at the field with my laptop - get in the air, switch to manual and see how she hovers/flies, and then land and adjust the software gains. Then see how that effects the flight characteristics in the other modes. Can't hurt I guess.
Like i said, I only have experience doing this with Multiwii (which has WAY more parameters to tweak and can be downright annoying at times!). For that system, I went round and round while trying to tune the PID in Horizon (self-level) mode, only to realize that I would get a more true adjustment if done in the most basic mode (Acro), then switch to the self-leveling modes on a pre-tuned quad. Might be apples to oranges though...not sure. I'll give it a shot and report back.
jfro
Aerial Fun
Thanks David. I'm thinking I might try tuning at the field with my laptop - get in the air, switch to manual and see how she hovers/flies, and then land and adjust the software gains. Then see how that effects the flight characteristics in the other modes. Can't hurt I guess.
Like i said, I only have experience doing this with Multiwii (which has WAY more parameters to tweak and can be downright annoying at times!). For that system, I went round and round while trying to tune the PID in Horizon (self-level) mode, only to realize that I would get a more true adjustment if done in the most basic mode (Acro), then switch to the self-leveling modes on a pre-tuned quad. Might be apples to oranges though...not sure. I'll give it a shot and report back.
My first MR was an x8 with HoverFly Pro. Nothing but manual to learn and tune. It can be done, but my advice would be this. Cheap props, do it now with the snow melting and ground soft. Find slushy ground and don't do much flying, just hovering looking for a twitch.
It worked for me, and I didn't know how to fly other than on my computer. What happened a lot though, was I tipped over and broke 1 or sometimes two lower props.... Went through a bunch. Once I got it flying I was able to fine tune it with a little slower response for my 2 axis gimbals. I now have a Naza V2/GPS, xAircraft, and am just trying a Pixhawk.
The xAircraft is on my X8. With both the Naza and xAircraft, I've never gotten the same buttery smooth flight for video taping that I got out of my Hoverfly Pro. Rebuilding the x8 with aluminum rectangle arms and will have at that again this week. Should see my new 32bit Alex mos board today or tomorrow so will have my hands full trying to get some smooth video. It's kind of a gimbal hell. I go back and forth trying to tune the gimbal and then the xAircraft. Hard to tell what's off sometimes. Just know have 2 gimbals I flew with gh2/gh3/black magic pocket cam on the Hoverfly xy8, that I have not been able to duplicate with my other 2 flight controllers.
I put a 3 axis gopro on my small quad and the yaw is not an issue anymore. I'm now convinced, once I figure out the x8 and 2 axis, I will immediately work on a 3rd axis for my 8x. Am switching to Avroto 3515/ 400kv motors and 15" props for 2 axis and 16" props for 3rd axis.
Look forward to hearing some more tuning tips from everyone's successful video flights on the xAircraft. The goal to end software stabilization continues!
Motopreserve
Drone Enthusiast
The question for me is whether the tuning is benefited by doing it in manual mode first, and then moving to the more 'advanced' modes. That was certainly the case for the Multiwii, even though I could use the self-leveling modes if I wanted (unlike a Hoverfly I guess, but much like the SuperX).
It's at least worth a shot. If it doesn't help, I can always go back to tuning with the Atti engaged.
Good uck with tuning the gimbals. By all accounts that can be a real tail-chase
It's at least worth a shot. If it doesn't help, I can always go back to tuning with the Atti engaged.
Good uck with tuning the gimbals. By all accounts that can be a real tail-chase