You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Picloc 3x setting experience etc.
- Thread starter BorisS
- Start date
Skysurf
Member
I am trying to set up the return to home function and emergency stop, can't seem to figure it out. Is there anyone that can tell me how to do this?
George, when I set the gains, my tilt and roll are "switched". When I adjust the gain for tilt, the gain for roll changes and vice versa.
/Jesper
George, when I set the gains, my tilt and roll are "switched". When I adjust the gain for tilt, the gain for roll changes and vice versa.
/Jesper
GeorgeM
Member
Hi Jesper,
This function is related to a single channel, Aux1
Depending what radio type you have set in the Options tab, AUX 1 will command an E-Stop if your selected channel is taken to one side, or bring your 3 axis to saved "home" positions on other side of your throws ( Stick, know, or 3 position switch)
It is a momentary function, meaning that is an OFF - ON or OFF - ON each time a change is made.
In later firmwares, this will be assignable as well, so that persons using radios without 3 position switches can have access to these functions.
If you don't have a 3 position switch, you can use your throttle stick assigned to AUX1 for now.
This function is related to a single channel, Aux1
Depending what radio type you have set in the Options tab, AUX 1 will command an E-Stop if your selected channel is taken to one side, or bring your 3 axis to saved "home" positions on other side of your throws ( Stick, know, or 3 position switch)
It is a momentary function, meaning that is an OFF - ON or OFF - ON each time a change is made.
In later firmwares, this will be assignable as well, so that persons using radios without 3 position switches can have access to these functions.
If you don't have a 3 position switch, you can use your throttle stick assigned to AUX1 for now.
hexacop
HexaCop
Hi,
I gave it another try today even the weather condition was too windy for a good test result.
I made 3 individual flights to be able to see the differences between
1. no stabilization with unplugged servos
2. stabilization on with standard MK FC
3. stabilization on with Picloc 3x
I have reduced the acceleration parameter from 200 to 80
The new video is here:
I gave it another try today even the weather condition was too windy for a good test result.
I made 3 individual flights to be able to see the differences between
1. no stabilization with unplugged servos
2. stabilization on with standard MK FC
3. stabilization on with Picloc 3x
I have reduced the acceleration parameter from 200 to 80
The new video is here:
Last edited by a moderator:
GeorgeM
Member
@Tammo, You can route any TX input to any Picloc Output through your servo output matrix. Just select which RX input you want to see at your Servo output, from the drop down menu in S1 to S6.
@HexaCop thanks for the comparison. What servos are you using on your mount ?? Still seems a bit too bumpy. Picloc can do much better. Can you post a picture of your mount ( or send it to me by email )
@HexaCop thanks for the comparison. What servos are you using on your mount ?? Still seems a bit too bumpy. Picloc can do much better. Can you post a picture of your mount ( or send it to me by email )
@HexaCop,
Sorry but can you reduce your generell vibration from your copter? With some Alpha Gel or so....Because you have to much vibration that we can give you some input, and please make some moves not to high, but make some nik and roll movements like 50m left and than 50m forward than back uso...
Then we can see how wonderfull picloc 3x is.....
Thanks ;-)
Michael
Sorry but can you reduce your generell vibration from your copter? With some Alpha Gel or so....Because you have to much vibration that we can give you some input, and please make some moves not to high, but make some nik and roll movements like 50m left and than 50m forward than back uso...
Then we can see how wonderfull picloc 3x is.....
Thanks ;-)
Michael
seattle_helo
Member
Hey George, maybe I've missed this somewhere but since servos are so critical to the optimum operation of the PicLoc maybe you can guide us a little to what are the ideal specs we should be looking for. Obviously their are hundreds of permutations with so many gimbal, servo and camera weight combinations. I believe you mentioned the MKS HV-787 earlier. Any other specific servos you can recommend?
GeorgeM
Member
MKS HV-787 is my preferred servo. 2nd is the Spektrum H6040 if your camera is smaller/lighter.
Both these servos exhibit relatively good characteristics for stabilization at entry level**
The output from Picloc-3X is really fast and instantaneous. The Servos need to act as fast as well, but will never be 'perfect'.
Actually, for 'perfect' stabilization, the motors are the key ingredient. But.... they're $$$ or $$$$.
** by entry level, I mean .. what almost everybody can afford, and offer high price/performance ratio.
Both these servos exhibit relatively good characteristics for stabilization at entry level**
The output from Picloc-3X is really fast and instantaneous. The Servos need to act as fast as well, but will never be 'perfect'.
Actually, for 'perfect' stabilization, the motors are the key ingredient. But.... they're $$$ or $$$$.
** by entry level, I mean .. what almost everybody can afford, and offer high price/performance ratio.
hexacop
HexaCop
@HexaCop thanks for the comparison. What servos are you using on your mount ?? Still seems a bit too bumpy. Picloc can do much better. Can you post a picture of your mount ( or send it to me by email )[/QUOTE]
Hi George, thank you for the input, see pictures below:
I'm using Savöx SC 1257TG for tilt and 4:1 gear ratio with external potentiometer.
Roll servo is MKDS18
The battery and the Picloc is mounted on the same board and the board is decoupled with alpha gel from the frame.
View attachment 1993
The picloc itself is mounted with additional alpha gel on top of the board.
View attachment 1994
The camera is decoupled once more with alpha gel.
The propellers are balanced and I do not see real visible vibrations on the frame.
It was too windy today to do another test, but I will further decrease the acceleration and try again.
Hi George, thank you for the input, see pictures below:
I'm using Savöx SC 1257TG for tilt and 4:1 gear ratio with external potentiometer.
Roll servo is MKDS18
The battery and the Picloc is mounted on the same board and the board is decoupled with alpha gel from the frame.
View attachment 1993
The picloc itself is mounted with additional alpha gel on top of the board.
View attachment 1994
The camera is decoupled once more with alpha gel.
The propellers are balanced and I do not see real visible vibrations on the frame.
It was too windy today to do another test, but I will further decrease the acceleration and try again.
Attachments

Last edited by a moderator:
HI GeorgeM
Ive been reading this Picloc forum, and is good to know that you join here to help us, ( future picloc owners) like me,
While im waiting for the mailman to deliver my picloc, im preparing myself for it reading this forum.....
I noticed that in your videos, while you're setting up for roll, nik, pan, in the servo output screen, it says SERVO REFRESH RATE: 250Hz
but i read in this forum, that someone was using and recommending 400Hz..... for a AV130 camera mount, the same one i have.....
Would you please let me know wich one is best??? and whats the difference in performance for a AV130??
thanks ....
Ive been reading this Picloc forum, and is good to know that you join here to help us, ( future picloc owners) like me,
While im waiting for the mailman to deliver my picloc, im preparing myself for it reading this forum.....
I noticed that in your videos, while you're setting up for roll, nik, pan, in the servo output screen, it says SERVO REFRESH RATE: 250Hz
but i read in this forum, that someone was using and recommending 400Hz..... for a AV130 camera mount, the same one i have.....
Would you please let me know wich one is best??? and whats the difference in performance for a AV130??
thanks ....
BorisS
Drone Enthusiast
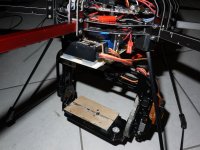
Hi George,
i hope its okay if i post this info from one of your emails ?
George Email
----------------------------------
If you want to make test like the PhotoshipOne's 3XPRO video on my website frontpage, you can mount the Picloc-3X on the Cameraplate.
Just disconnect mechanically the pots ( leave them dangling for now), and set the Picloc Servo output to 1500us from the servo matrix selector ( item before Tilt, ROll, Pan etc etc selection in the servo tabs )
Center the poti so that the servo is still on 1500us output from Picloc.
----------------------------------
I would like to also try this version, can you confirm it is already working ? and is the way i mount the picloc in the picture okay ?
Concerning the settings for gains I am confused would i still drive the setup in proportional ?
Stated this here and not via email because it could be helpful for some others
Boris
View attachment 2002
By the way i got the picloc standard today and thanks for the candy")
i hope its okay if i post this info from one of your emails ?
George Email
----------------------------------
If you want to make test like the PhotoshipOne's 3XPRO video on my website frontpage, you can mount the Picloc-3X on the Cameraplate.
Just disconnect mechanically the pots ( leave them dangling for now), and set the Picloc Servo output to 1500us from the servo matrix selector ( item before Tilt, ROll, Pan etc etc selection in the servo tabs )
Center the poti so that the servo is still on 1500us output from Picloc.
----------------------------------
I would like to also try this version, can you confirm it is already working ? and is the way i mount the picloc in the picture okay ?
Concerning the settings for gains I am confused would i still drive the setup in proportional ?
Stated this here and not via email because it could be helpful for some others
Boris
View attachment 2002
By the way i got the picloc standard today and thanks for the candy
Attachments

Last edited by a moderator:
GeorgeM
Member
@Daniel : Sorry for 17hr delay in replying.
Picloc-3X supports 50,77,100,250,333 and 400Hz update rates.
Now, 50 and 77Hz are aimed at users who are using analog servos on their camera mounts.
Analog servos are not designed to run at much higher than 77Hz( probably 100Hz max ). Otherwise they get hot.
Digital servos, accept a wide variety of update rates from your source.... whether its a receiver, tail rotor gyro, a Flybarless controller, or a Picloc.
The internal servo electronics drive their motors at a fixed frequency.
Different servo manufacturers have different flavors on the internal update rates to their motors through what is called an H-Bridge driver.
The update rates for the motor are usually 'heard' as a high pitched 'whine' or 'buzz' when you exert some force on a servo. ( when it's fighting back to keep its position )
This internal update rate is usually between 250Hz and 500Hz.
If your servo supports 400Hz, then updating it at this frequency will yield slightly better stabilization results.
One can verify the effectiveness of high servo update rates by switching from 50Hz to max frequency from PiclocToolz. The stabilization is tighter, especially if using Picloc with 360 servos ( ie mounted in inner axis ) ....
.. which neatly segues to Boris's question ..
@Boris : Yes.. That is correct. In fact anywhere on the Tilt axis is fine.
The way you photographed it seems like a neat way of installing it on the cinestar gimbal, with just a piece of double sided tape...leaving the USB accessible.
In similar cases, when installing Picloc on the inner axis and therefore, with 360 servos,
it is important to mount Picloc as rigidly as possible to your camera mount, so that all movements are sensed by Picloc accurately.
This mounting method can then afford to have very 'loose' vibration isolation on the roll and tilt axis from the mount's hanging point.
However, if also stabilizing PAN, it is important that your vibe isolation system has lateral only rigidity.
In larger and similar stabilizing systems, the hanging point is actually a CV joint , or a Universal Joint ,
such as used in this type of stab system here.
You can see that it is really free on the Tilt and roll axis... yet rigid in the PAN axis.
Hope this helps
Picloc-3X supports 50,77,100,250,333 and 400Hz update rates.
Now, 50 and 77Hz are aimed at users who are using analog servos on their camera mounts.
Analog servos are not designed to run at much higher than 77Hz( probably 100Hz max ). Otherwise they get hot.
Digital servos, accept a wide variety of update rates from your source.... whether its a receiver, tail rotor gyro, a Flybarless controller, or a Picloc.
The internal servo electronics drive their motors at a fixed frequency.
Different servo manufacturers have different flavors on the internal update rates to their motors through what is called an H-Bridge driver.
The update rates for the motor are usually 'heard' as a high pitched 'whine' or 'buzz' when you exert some force on a servo. ( when it's fighting back to keep its position )
This internal update rate is usually between 250Hz and 500Hz.
If your servo supports 400Hz, then updating it at this frequency will yield slightly better stabilization results.
One can verify the effectiveness of high servo update rates by switching from 50Hz to max frequency from PiclocToolz. The stabilization is tighter, especially if using Picloc with 360 servos ( ie mounted in inner axis ) ....
.. which neatly segues to Boris's question ..
@Boris : Yes.. That is correct. In fact anywhere on the Tilt axis is fine.
The way you photographed it seems like a neat way of installing it on the cinestar gimbal, with just a piece of double sided tape...leaving the USB accessible.
In similar cases, when installing Picloc on the inner axis and therefore, with 360 servos,
it is important to mount Picloc as rigidly as possible to your camera mount, so that all movements are sensed by Picloc accurately.
This mounting method can then afford to have very 'loose' vibration isolation on the roll and tilt axis from the mount's hanging point.
However, if also stabilizing PAN, it is important that your vibe isolation system has lateral only rigidity.
In larger and similar stabilizing systems, the hanging point is actually a CV joint , or a Universal Joint ,
such as used in this type of stab system here.
You can see that it is really free on the Tilt and roll axis... yet rigid in the PAN axis.
Hope this helps
Last edited by a moderator:
Garagelars
Member
Hi! Im new to this forum, but has been following this thread with interest!
I reflected on the mounting of Picloc on the CineStar gimbal, as I myself made a little shelf for the Picloc on the firm vertical boom..
(No risk twisting the cables i.ex.)
View attachment 2023
Would like to understand more about the preferred mounting on the tilt axis?
Thanks in advance,
//Lars in Sweden
I reflected on the mounting of Picloc on the CineStar gimbal, as I myself made a little shelf for the Picloc on the firm vertical boom..
(No risk twisting the cables i.ex.)
View attachment 2023
Would like to understand more about the preferred mounting on the tilt axis?
Thanks in advance,
//Lars in Sweden
