R_Lefebvre
Arducopter Developer
I'm starting this thread in the interested of not further hyjacking this thread:
http://www.multirotorforums.com/showthread.php?5825-Hamer-X4-Ultimate-Kopter-for-Filming-Industry
Some other photos of my multicopter build are here, if you're interested:
http://www.diydrones.com/forum/topics/new-octo-copter-design-build-thread?id=705844%3ATopic%3A970360&page=1#comments
I don't really fee like rehosting all the photos, and I'm sure the frame itself isn't of much interest here anyway.
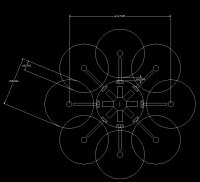
But to go on with the discussion of overlapping props...
Good question. I think as long as you don't have all the motors on the bottom going all one direciton, and the top motors in the opposite direction, I think the FC will be able to balance it. But, it would have to be tested.
I've already done the math on that as it was my original design. A 756mm octo with 13" props would have an 18% overlap.
http://www.multirotorforums.com/showthread.php?5825-Hamer-X4-Ultimate-Kopter-for-Filming-Industry
Some other photos of my multicopter build are here, if you're interested:
http://www.diydrones.com/forum/topics/new-octo-copter-design-build-thread?id=705844%3ATopic%3A970360&page=1#comments
I don't really fee like rehosting all the photos, and I'm sure the frame itself isn't of much interest here anyway.
But to go on with the discussion of overlapping props...
Rob
An interesting set of figures. I am wondering however what effect having more pitch on the lower blades has on Yaw stability.
Good question. I think as long as you don't have all the motors on the bottom going all one direciton, and the top motors in the opposite direction, I think the FC will be able to balance it. But, it would have to be tested.
Thanks for the info RLefebvre..very valuable. I'm looking to keep the octo's diameter the same as my hexa with 13" props which is approx 760mm. Would it be possible to figure out the required amount of overlap for the octo with these numbers?
I've already done the math on that as it was my original design. A 756mm octo with 13" props would have an 18% overlap.
")