You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
XAircraft SuperX
- Thread starter envy
- Start date
Motopreserve
Drone Enthusiast
The amp draw would only be shown by some telemetry if you have it. I do t think the black box has any of that info since the superx is not tracking that.
Sounds like you're on the right path.
Sounds like you're on the right path.
SamaraMedia
Active Member
And I don't believe the OSD gives current draw either like my Disco Pro
fltundra
Member
SuperX with Taranis using S-bus, after 15 months I am just one flight away from reaching the 100 hour mark.
View attachment 25031
Video I posted when I first received my SuperX.
View attachment 25031
Video I posted when I first received my SuperX.
Attachments

SamaraMedia
Active Member
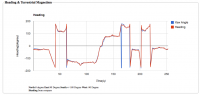
Still trying to iron out my gains and tuning for a Tarot X6, getting closer but finding the altitude hold in forward flight is not great, can someone take a look at my latest logs and see what I might do to correct this.
http://log.xaircraft.com/#2015_07_09_031955.000_109.1.04.12
http://log.xaircraft.com/report.htm#2015_07_09_031955.000_109.1.04.12
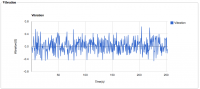
Should my Heading & Terrestrial Magnetism chart look like this? Vibration level seems acceptable.
Thanks
http://log.xaircraft.com/#2015_07_09_031955.000_109.1.04.12
http://log.xaircraft.com/report.htm#2015_07_09_031955.000_109.1.04.12
Should my Heading & Terrestrial Magnetism chart look like this? Vibration level seems acceptable.
Thanks
Attachments
Last edited by a moderator:
Hexacrafter
Manufacturer
jwoike,
Can you provide AUW/ Prop & Motor....
Just a thought... may be completely wrong, but is the aircraft too heavy?
When a FC is trying to hold Altitude and it is at 60% or more throttle, many FC cannot hold altitude in forward flight.
I have seen this behavior when an aircraft has a high throttle% at hover.
Again... just a thought... May be wrong...
Can you provide AUW/ Prop & Motor....
Just a thought... may be completely wrong, but is the aircraft too heavy?
When a FC is trying to hold Altitude and it is at 60% or more throttle, many FC cannot hold altitude in forward flight.
I have seen this behavior when an aircraft has a high throttle% at hover.
Again... just a thought... May be wrong...
fltundra
Member
At least with my experience with the X, The rear motors will start tagging 99% in fast forward flight if your underpowered.jwoike,
Can you provide AUW/ Prop & Motor....
Just a thought... may be completely wrong, but is the aircraft too heavy?
When a FC is trying to hold Altitude and it is at 60% or more throttle, many FC cannot hold altitude in forward flight.
I have seen this behavior when an aircraft has a high throttle% at hover.
Again... just a thought... May be wrong...
@jwoike Try flying it in GPS mode at 100% forward flight. Mine holds perfect altitude in gps at 25kph.
In atti mode when over 20kph, mine loses a little alt as forward speed increases.
Motopreserve
Drone Enthusiast
I've always found myself compensating for a bit of altitude loss in FFF in atti as well. I think most FCs exhibit a bit of this.
fltundra
Member
Only thing I see is your gps sat count is low on all your flights. Is this the way you have the gps now in the photo?Still trying to iron out my gains and tuning for a Tarot X6, getting closer but finding the altitude hold in forward flight is not great, can someone take a look at my latest logs and see what I might do to correct this.
http://log.xaircraft.com/#2015_07_09_031955.000_109.1.04.12
http://log.xaircraft.com/report.htm#2015_07_09_031955.000_109.1.04.12
Should my Heading & Terrestrial Magnetism chart look like this? Vibration level seems acceptable.
Thanks
If so I would raise it above the lipos and recalibrate the compass.
View attachment 25499
Attachments

SamaraMedia
Active Member
@Hexacrafter - Here's my configuration:
Tarot X6, SuperX and KDE 4012 400kvs, with KDE 15" triple props. AUW is 7659g so about 1260g needed at each motor which is right around the 1270g KDE claims for this motor at 50% throttle. Weight is with 2 5000mAh 6s batts, testing as single battery and getting about 4 minutes flight. Plan to get 10-16000mAh battery for this but for now will run them in parallel and hope for 8 minute flights.
@fltundra - Moved some things around yesterday before test flights. Took your advice and moved the rx under the top plate and away from the GPS puck. Also ran the esc leads directly into the SuperX rather than the using the integrated circuits so that I could move the IO to a parallel placement next to the IMU. That photo is from my first use of the SuperX on a UAP1 frame. Here is a shot of the SuperX and battery plate for the X6. I'm using the standard SuperX GPS puck standoff.
Here's a log of my second flight yesterday, in GPS, after getting the gain in a good setting.
http://log.xaircraft.com/#2015_07_09_031955.000_107.1.04.06
http://log.xaircraft.com/report.htm#2015_07_09_031955.000_107.1.04.06
Thanks guys!
Tarot X6, SuperX and KDE 4012 400kvs, with KDE 15" triple props. AUW is 7659g so about 1260g needed at each motor which is right around the 1270g KDE claims for this motor at 50% throttle. Weight is with 2 5000mAh 6s batts, testing as single battery and getting about 4 minutes flight. Plan to get 10-16000mAh battery for this but for now will run them in parallel and hope for 8 minute flights.
@fltundra - Moved some things around yesterday before test flights. Took your advice and moved the rx under the top plate and away from the GPS puck. Also ran the esc leads directly into the SuperX rather than the using the integrated circuits so that I could move the IO to a parallel placement next to the IMU. That photo is from my first use of the SuperX on a UAP1 frame. Here is a shot of the SuperX and battery plate for the X6. I'm using the standard SuperX GPS puck standoff.
Here's a log of my second flight yesterday, in GPS, after getting the gain in a good setting.
http://log.xaircraft.com/#2015_07_09_031955.000_107.1.04.06
http://log.xaircraft.com/report.htm#2015_07_09_031955.000_107.1.04.06
Thanks guys!
Attachments

Hexacrafter
Manufacturer
jwoike,
Please call me...
The phone# is on the website.
Please call me...
The phone# is on the website.
fltundra
Member
I can tell you that when I have only 8 sats compared to 12-14 sats, it's a big difference the way it holds position.@Hexacrafter - Here's my configuration:
Tarot X6, SuperX and KDE 4012 400kvs, with KDE 15" triple props. AUW is 7659g so about 1260g needed at each motor which is right around the 1270g KDE claims for this motor at 50% throttle. Weight is with 2 5000mAh 6s batts, testing as single battery and getting about 4 minutes flight. Plan to get 10-16000mAh battery for this but for now will run them in parallel and hope for 8 minute flights.
@fltundra - Moved some things around yesterday before test flights. Took your advice and moved the rx under the top plate and away from the GPS puck. Also ran the esc leads directly into the SuperX rather than the using the integrated circuits so that I could move the IO to a parallel placement next to the IMU. That photo is from my first use of the SuperX on a UAP1 frame. Here is a shot of the SuperX and battery plate for the X6. I'm using the standard SuperX GPS puck standoff.
Here's a log of my second flight yesterday, in GPS, after getting the gain in a good setting.
http://log.xaircraft.com/#2015_07_09_031955.000_107.1.04.06
http://log.xaircraft.com/report.htm#2015_07_09_031955.000_107.1.04.06
Thanks guys!
")
Might try shielding the bottom of the gps puck, some seem to have had luck.
SamaraMedia
Active Member
Thanks, I'll look into it, or raise the puck...
Motopreserve
Drone Enthusiast
I have my puck shielded with copper tape on the bottom of the 3D pick holder I have. Not sure if that's what gives me the luck with satellites - but I can't hurt
SamaraMedia
Active Member
So should I put the copper tape on the bottom of the puck or on top of the top plate if I go that route.
Motopreserve
Drone Enthusiast
I have a puck holder that fully encompasses the puck - so I just cut it to fit in the bottom of the holder. If you have the standard style mast - I guess just put it on the bottom of the puck itself.
SamaraMedia
Active Member
Standard holder, thanks.
SamaraMedia
Active Member
I know you all love your Super X but I'm about to throw in the towel on this build I've got going, just don't feel the confidence that you all describe and I can't quite put my finger on the problem. Maybe it's not the FC at all, maybe it's the esc's? Not sure but after my last couple test flights I'm more frustrated than ever. I've tried 15" triple props, 15" T-Motor props. I moved my batteries to the top plate because I felt having the gimbal and batteries mounted under the centerplate dropped the CoG to low from the IMU. Feels better balanced when I'm doing the sat-dance so that can't be a bad thing. I tried recalibrating the esc's from the radio although with the KDE esc they don't calibrate like normal esc's, you don't get the tones since they are factory calibrated. I may need to swap in some older ZTW's I have used before just to see if it makes a difference.
When I dug into the setup video and re did all my center throttle and max stick movements I realized that my gains may have been set to high, everything set to 1.1, so I brought them back down to 1.0 and lowered the Yaw and Height to .9 after Drew mentioned something about lowering the gains if you are running a heavier hex or octo. First flight went ok, seemed pretty stable in the light wind at hover and in forward flight. Second battery gave me a toilet bowl effect on hover that I've never had before, landed, restarted and had the same effect. Landed, swapped batteries and tried again, lift off good but hover became a twitchy little bugger that I decided was better to land than crash. Back at the house and getting ready for work so no time to tinker some more.
Worst part is, after looking at the video on my Sony handicam (not imported yet for viewing on computer) it seems to be the best result gimbal wise I've had...sigh...
Here is the latest logs, if anyone sees something in them or in my post that stands out, your expertise is welcome as always. Strange how the last flight on the report there is no minimum voltage recorded.
Thanks
http://log.xaircraft.com/#2015_08_05_095530.750_126.1.02.23
When I dug into the setup video and re did all my center throttle and max stick movements I realized that my gains may have been set to high, everything set to 1.1, so I brought them back down to 1.0 and lowered the Yaw and Height to .9 after Drew mentioned something about lowering the gains if you are running a heavier hex or octo. First flight went ok, seemed pretty stable in the light wind at hover and in forward flight. Second battery gave me a toilet bowl effect on hover that I've never had before, landed, restarted and had the same effect. Landed, swapped batteries and tried again, lift off good but hover became a twitchy little bugger that I decided was better to land than crash. Back at the house and getting ready for work so no time to tinker some more.
Worst part is, after looking at the video on my Sony handicam (not imported yet for viewing on computer) it seems to be the best result gimbal wise I've had...sigh...
Here is the latest logs, if anyone sees something in them or in my post that stands out, your expertise is welcome as always. Strange how the last flight on the report there is no minimum voltage recorded.
Thanks
http://log.xaircraft.com/#2015_08_05_095530.750_126.1.02.23
Last edited by a moderator:
Motopreserve
Drone Enthusiast
It seems to me there may be something else going on (separate or in addition to the superx) if your battery swap caused there to be different behavior.
What mode are you flying in when you get this behavior?
EDIT: sorry. Got the black box open. I see you're only in GPS mode. Have you tried to see if this behavior follows the flight modes?
Also, seems your battery got pretty low in a fairly short amount of time. Flight showed under 3 minutes and the battery was already near landing voltage .
What mode are you flying in when you get this behavior?
EDIT: sorry. Got the black box open. I see you're only in GPS mode. Have you tried to see if this behavior follows the flight modes?
Also, seems your battery got pretty low in a fairly short amount of time. Flight showed under 3 minutes and the battery was already near landing voltage .
SamaraMedia
Active Member
GPS, haven't had the confidence to try much else. Probably should try Atti mode.
Yeah, using some older 5000 6s batts, only get about 3-3:30 flight time. Plan to run in parallel when more dialed in, have both on the rig for weight but using separate for testing.
Maybe using such a small battery on a large (6-7k) rig is not a good idea, probably asking too much from small old batt.
Probably need to spring for some new batts.
Yeah, using some older 5000 6s batts, only get about 3-3:30 flight time. Plan to run in parallel when more dialed in, have both on the rig for weight but using separate for testing.
Maybe using such a small battery on a large (6-7k) rig is not a good idea, probably asking too much from small old batt.
Probably need to spring for some new batts.
Last edited by a moderator: