You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Picloc 3x setting experience etc.
- Thread starter BorisS
- Start date
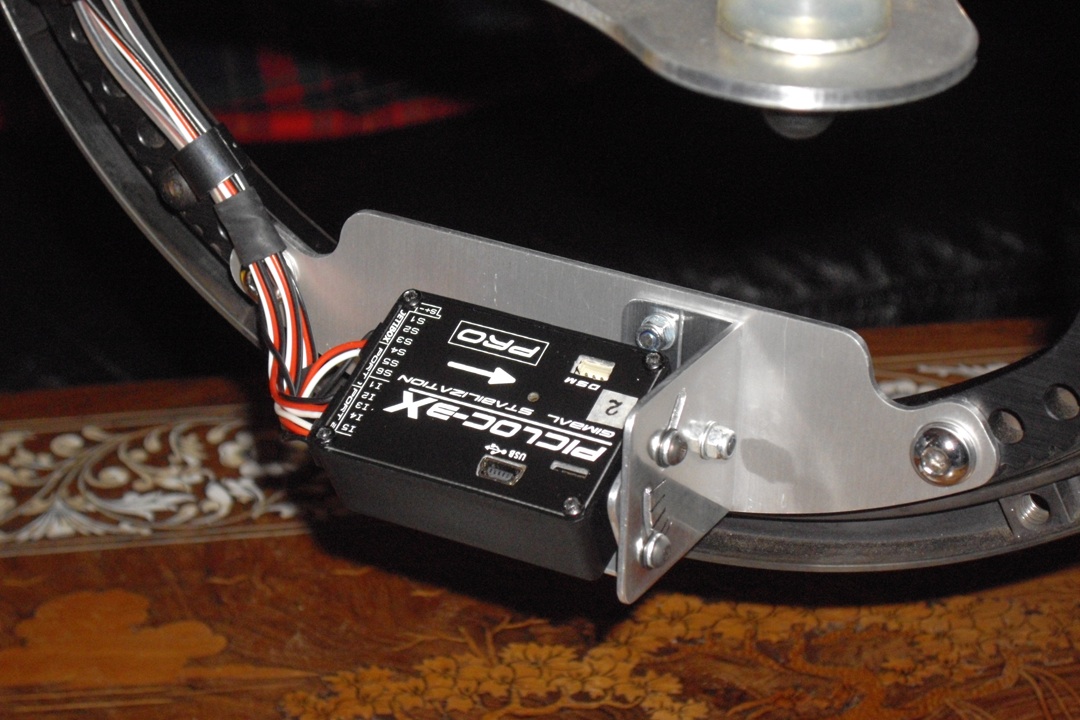
i have picloc installed on the pipe where the camera is mounted (beside my FS100 with arrow in tilt direction). this won't go with a DSLR... i use the cinestar 3 axis gimbal.
i know that the servos are proportional but it works for me... i had it the same way on my AV200.
greetings
Rolle
i would like to set it also on the camera-plate. but when i tilt it more than 60° down, the picloc runs crazy. so you can't look down by 90°. or is this already fixed?
if someone has the 053.hex, i would like to get it, too.
thanks
rolle
Member
Could you post a picture once you have time. I cant really picture were you mounted it.
Thanks
Boris
no problem - i can post it tomorrow
")
rolle
Member
just another thing about my picloc.
i installed it with arrow in tilt direction.
in picloc tools i have some wrong controlls. In some cases nick is roll and roll is nick in some cases it's normal.
for example i have the checkbox for stabilization on/off for the tilt axis but it controls the roll axis while the checkbox for slew on/off of the same axis controls tilt...
one can find many of those confusing things...
Is it because i use it with arrow in tilt?
I can't use Jetibox with my picloc because of a factory fault. George gave me some instructions to change the component part because he cannot change my picloc (he don't have some). this means, if picloc breaks one day (i hope it won't) it's nearly impossible to get a new one... for me as a professionell user (i work for german television) this is not very amusing... i bought only one of these boxes to see if it works. Picloc is kind of beta i think and its useable in some cases but still away from what was promised.
It's good to see, that George is working hard to get things working but i would definitely pay lot more for picloc when i could get a working box...
at the moment i use picloc to stabilize the roll axis and sometimes the tilt axis. most of my filming i don't use tilt stabilization and control it by myself. i didn't fly with HD55 yet...
greetings
Rolle
i installed it with arrow in tilt direction.
in picloc tools i have some wrong controlls. In some cases nick is roll and roll is nick in some cases it's normal.
for example i have the checkbox for stabilization on/off for the tilt axis but it controls the roll axis while the checkbox for slew on/off of the same axis controls tilt...
one can find many of those confusing things...
Is it because i use it with arrow in tilt?
I can't use Jetibox with my picloc because of a factory fault. George gave me some instructions to change the component part because he cannot change my picloc (he don't have some). this means, if picloc breaks one day (i hope it won't) it's nearly impossible to get a new one... for me as a professionell user (i work for german television) this is not very amusing... i bought only one of these boxes to see if it works. Picloc is kind of beta i think and its useable in some cases but still away from what was promised.
It's good to see, that George is working hard to get things working but i would definitely pay lot more for picloc when i could get a working box...
at the moment i use picloc to stabilize the roll axis and sometimes the tilt axis. most of my filming i don't use tilt stabilization and control it by myself. i didn't fly with HD55 yet...
greetings
Rolle
Hi there, hi george
Doing some test- and adjustment flights. All of a sudden, about 5sec. after working with toolz, tools freezes up and Picloc PRO got kickt out of my laptop system. Replugging, it tells me i shoud install a driver??
I did install a new driver, bit without succses. Message: Unknown device! This time, laptop is recognizeing a divice but not the PiclocPRO. With my STD everthing runs fine. Can you george or anyone help me again?
tx ray
hi.
similar issues here. after working with tools (but without a freeze) and picloc yesterday, the laptop recognizing picloc, too, but no withe-led and no contact from tools with picloc.
what happened now??
picloc is working/stabilising, red led is flashing lite, blue led flashing too and slower, green led is turning on, when i'm switching pan on/off. normal, as usual.
but no contact with tools.
rene.m check if something is wrong with the usb socket. Some of the units had bad soldering and the USB socket didn't work from beginning or stopped working. Wiggle the usb cable once connected and see if you get a connection.
Boris
thanks, i could fix it.
MombasaFlash
Heli's & Tele's bloke
i would like to set it also on the camera-plate. but when i tilt it more than 60° down, the picloc runs crazy. so you can't look down by 90°.
With off-axis mounting, such as the Tilt and Roll on an AV200, the only travel limits as far as PL is concerned are those imposed by the external pots i.e. maybe 110°. As Picloc remains stationary it suffers no ill effects.
However, when it is ON-axis, as you wish to do, i.e. on the camera plate, the PL is limited to around 55° of tilt before the Roll axis starts becoming a second Pan axis. At this point PL gets confused, doesn't know what to do and ... "goes crazy".
I have addressed this on the big gasser heli by mounting the PL on a swivelling bracket that allows it to be set at up to -35°. As we do not need very much upward tilt (blades, booms, motors etc. are NOT photogenic) the PL will not be subjected to very much more negative tilt than that. Perhaps another 10° at most. So at -45° of total tilt the PL is still comfortable and keeps its hair on.
The big advantage is that the forward tilt now has a bonus of up to 35° of extra camera angle. So if your camera is angled at 90° down (vertical) PL is still only at 55°. However, as I do not personally like the Google Earth vertical view much I have left the PL set at -20° with forward tilt at 55°, giving around 75° of camera forward tilt. It is early days yet because I have only just started flight testing the 3X so these angles are subject to change.
However, as always there is a payoff. If the PL is not mounted level, Roll commands will result in some sympathetic panning. This is not altogether as ugly as it sounds as in practice the subject is actually kept more centre frame during the Roll.
... Picloc has to be in flat position on startup ...
I am not sure this is the case. In the above installation, with the PL mounted at a negative angle, I adjust the SVR1 value until the camera plate is brought more or less level and this new position is accepted by PL as the 'Home" position. Start position can still be set differently.
The following video is the first flight test yesterday of the 3X mounted on a Copterworks AF25B petrol powered heli with CW gimbal (apologies for the rather gloomy camera setting). The purpose was to determine whether or not Picloc with its basic bench settings would perform sufficiently well to merit further investment in time and effort. Happily, the 3X performs immeasurably better than the preceding TRv3/2X series.
Last edited by a moderator:
anybody still have the 53 FW as in the hex file ?
thanks
Boris
i found the first v055 in my trash. date 15.12.2011. thats the oldest one i have.
2011_12_15_P3X_v055_PRO.hex
login guest@renem
pw guest1
Last edited by a moderator:
With off-axis mounting, such as the Tilt and Roll on an AV200, the only travel limits as far as PL is concerned are those imposed by the external pots i.e. maybe 110°. As Picloc remains stationary it suffers no ill effects.
However, when it is ON-axis, as you wish to do, i.e. on the camera plate, the PL is limited to around 55° of tilt before the Roll axis starts becoming a second Pan axis. At this point PL gets confused, doesn't know what to do and ... "goes crazy".
I have addressed this on the big gasser heli by mounting the PL on a swivelling bracket that allows it to be set at up to -35°. As we do not need very much upward tilt (blades, booms, motors etc. are NOT photogenic) the PL will not be subjected to very much more negative tilt than that. Perhaps another 10° at most. So at -45° of total tilt the PL is still comfortable and keeps its hair on.
The big advantage is that the forward tilt now has a bonus of up to 35° of extra camera angle. So if your camera is angled at 90° down (vertical) PL is still only at 55°. However, as I do not personally like the Google Earth vertical view much I have left the PL set at -20° with forward tilt at 55°, giving around 75° of camera forward tilt. It is early days yet because I have only just started flight testing the 3X so these angles are subject to change.
However, as always there is a payoff. If the PL is not mounted level, Roll commands will result in some sympathetic panning. This is not altogether as ugly as it sounds as in practice the subject is actually kept more centre frame during the Roll.
ah, thats a good idea. george told me last year, i should mount the picloc off the axises, when i have "potied-servos". to rotate it a bit, thats what i haven't thought about it.
ah great just checked it out i need a login and password, or should i just PM you my email ?
ah, right.
please read again my post #570
MombasaFlash
Heli's & Tele's bloke
I think you might find that v053 might not work because it will possibly have been removed from RotorPics and therefore will not pass the version checker when trying to install it.
I may be wrong.
I may be wrong.
aopen3434@hotmail.com
http://offthegridwater.ca
How much was that I likeit ??? OFF http://WWW.THEGRIDWATER.CA/
I wonder if this will fit on my t580 what is the siz?
<iframe width="560" height="315" src="http://www.youtube.com/embed/UUT1icXmDs4" frameborder="0" allowfullscreen></iframe>
http://WWW.THEGRIDWATER.CA/
I wonder if this will fit on my t580 what is the siz?
<iframe width="560" height="315" src="http://www.youtube.com/embed/UUT1icXmDs4" frameborder="0" allowfullscreen></iframe>
http://WWW.THEGRIDWATER.CA/
Last edited by a moderator:
MombasaFlash
Heli's & Tele's bloke
I wonder if this will fit on my t580 what is the siz?
<iframe src="%3Ca%20href=" http:="" www.youtube.com="" embed="" uut1icxmds4"="" target="_blank" height="315" width="560">http://www.youtube.com/embed/UUT1icXmDs4</a>" frameborder="0" allowfullscreen></iframe>
http://WWW.THEGRIDWATER.CA/
Try again. Nothing works
aopen3434@hotmail.com
http://offthegridwater.ca
I can fix for a modest fee?
MombasaFlash
Heli's & Tele's bloke
Huh?
BorisS
Drone Enthusiast
Just installed 53 fw got a version from George. The Picloc toolz old 53 version doesnt work with the FW 53 version anymore, no clue why, programm crashes. Works though with the HD55 toolz version ( not completly but enough to test FW 53 again) and my roll issues are gone. Starting up motors with probs on keep the roll axis stable without movement like seen in 55HD.
Minimal movements but much better than HD55. Probably once its in the air also these small correction will be gone I hope
compared to HD53
Minimal movements but much better than HD55. Probably once its in the air also these small correction will be gone I hope
compared to HD53
Last edited by a moderator:
luftaufnahmen ostsee
Member
Hallo,
I tried FW HD 055 today. I noticed that the accelleration on roll got very slow even when at maximum. My roll was much faster before. Tilt is allright.
Is there a solution?
Derek
I tried FW HD 055 today. I noticed that the accelleration on roll got very slow even when at maximum. My roll was much faster before. Tilt is allright.
Is there a solution?
Derek