Spent the time this afternoon doing,,, guess what? Yep, that's right, working on my new gimbal! It's an Arris cm-200 from Hobby Wing.
My first impressions.
It comes completely assembled and set up, tested by them.
It is balanced, I assume for a GP3. My GP2 with my lens protector mounted would not balance, even after loosening the roll bolts and adjusting it all the way out on the slots.
I removed the roll plate from the mount and filed the slots longer. It's not perfect yet, but I'm willing to do a test flight first to see how it behaves.
I'm positive it would balance just fine without the lens protector, but I'm not willing to fly without it.
Fit was good, well assembled.
However, she definitely will not survive an impact! I suspected that going in.
There is no slop in the frame design, so that is good.
To mount the gimbal I removed the top plate, marked and drilled the holes to mount to my load rail mounts.
I , also, drilled out a hole in the center plate to accept my fpv camera mount.
All went exceptionally well.
I then hooked up power to my regulator, before my lc filter running my fpv system, to supply 12 vdc power.
The manual and other necessary software to tune, ( not recommended for beginners ), all comes on a dvd.
The manual is pretty simple.
The board is all open source and has a usb port installed to easily update as firmware upgrades.
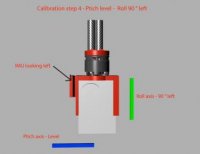
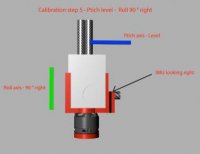
Powering up the system, it sits there for a few seconds as it does it's thing, then everything moved to perfect level on both roll and tilt.
It does come with a cable to hook up manual roll and tilt control, but I removed this as I am using s-bus on my Futaba receiver.
Going to have to figure out how I can manually control the tilt.
So far, so good, I'm pleased with the purchase!