In the process of converting my flat okto into a coax X8 setup. To make wiring easier I have been looking for a mixer file that has motors 1&2 on boom arm 1, motors 3&4 on boom arm 2, motors 5&6 on arm 3 and motors 7&8 on arm 4. Anyone using such a mixer setup and would like to share the mkm. file? Any help would be appreciated.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
X8 mixer mkm. File request
- Thread starter alexoki
- Start date
hexacop
HexaCop
Hi alexoki,
you can download it from the MK wiki page:
http://www.mikrokopter.de/ucwiki/mkm
Scroll down to the X8 ...
you can download it from the MK wiki page:
http://www.mikrokopter.de/ucwiki/mkm
Scroll down to the X8 ...
Mactadpole
Member
In the process of converting my flat okto into a coax X8 setup. To make wiring easier I have been looking for a mixer file that has motors 1&2 on boom arm 1, motors 3&4 on boom arm 2, motors 5&6 on arm 3 and motors 7&8 on arm 4. Anyone using such a mixer setup and would like to share the mkm. file? Any help would be appreciated.
I fly MK X8's and when I was getting into them I also looked for such a mixer setup. Seems I recall you can't do this because of how the mixer is structured, unless you re-address the Bl's on the octo distro board (ie. make #2 be #5, etc.). I decided not to deal with that confusion and in the end its no so bad if you label your wires before soldering.
Maybe someone knows different.
Shawn
Mactadpole
Member
Thanks for the replies. I ended up writing my own mixer mkm. file so that I could have the motor placement and wiring where I wanted them. So far, so good, flying smooth.
Do you mind sharing the mixer file? Would be nice to have! I really thought you couldn't do it but great to know you can!
Thanks, Shawn
Mactadpole
Member
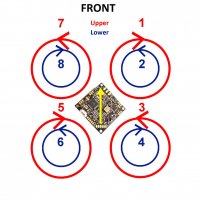
I put together a mixer file that I think will work for this configuration and would like to know if it is correct. This mixer layout will be ideal for those using the Okto power distribution board because it puts the wires from the arms exiting adjacent/below the BL's those motors are addressed to.
I used these directions (from Rusty & OMM on RCG):
Gas- All motors that are used get +64. Motors that are not used get 0 for all their settings.
Pitch (Nick)- Draw a picture of your copter, then draw a horizontal line through the center. Every motor that is above the line gets +64. Every motor below the line gets -64. If the motor is on the line, then it gets 0.
Roll- Draw a vertical line through the center of the picture. Every motor on the left side of the line gets +64. Every motor on the right side of the line gets -64. Every motor on the line gets 0.
Yaw- Every prop that turns clockwise when looking down at it gets +64. Every prop that turns counter clockwise gets -64.
Does it look right?
[Info]
Name=Octo-X8
Version=1
[Gas]
Motor1=64
Motor2=64
Motor3=64
Motor4=64
Motor5=64
Motor6=64
Motor7=64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0
[Nick]
Motor1=64
Motor2=64
Motor3=-64
Motor4=-64
Motor5=-64
Motor6=-64
Motor7=64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0
[Roll]
Motor1=-64
Motor2=-64
Motor3=-64
Motor4=-64
Motor5=64
Motor6=64
Motor7=64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0
[Yaw]
Motor1=64
Motor2=-64
Motor3=-64
Motor4=64
Motor5=64
Motor6=-64
Motor7=-64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0
I used these directions (from Rusty & OMM on RCG):
Gas- All motors that are used get +64. Motors that are not used get 0 for all their settings.
Pitch (Nick)- Draw a picture of your copter, then draw a horizontal line through the center. Every motor that is above the line gets +64. Every motor below the line gets -64. If the motor is on the line, then it gets 0.
Roll- Draw a vertical line through the center of the picture. Every motor on the left side of the line gets +64. Every motor on the right side of the line gets -64. Every motor on the line gets 0.
Yaw- Every prop that turns clockwise when looking down at it gets +64. Every prop that turns counter clockwise gets -64.
Does it look right?
[Info]
Name=Octo-X8
Version=1
[Gas]
Motor1=64
Motor2=64
Motor3=64
Motor4=64
Motor5=64
Motor6=64
Motor7=64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0
[Nick]
Motor1=64
Motor2=64
Motor3=-64
Motor4=-64
Motor5=-64
Motor6=-64
Motor7=64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0
[Roll]
Motor1=-64
Motor2=-64
Motor3=-64
Motor4=-64
Motor5=64
Motor6=64
Motor7=64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0
[Yaw]
Motor1=64
Motor2=-64
Motor3=-64
Motor4=64
Motor5=64
Motor6=-64
Motor7=-64
Motor8=64
Motor9=0
Motor10=0
Motor11=0
Motor12=0