Droider
Drone Enthusiast
Yes and I will post the settings file in the next vid. A lot going on right now!
Nowt changed there then buddy!
We wait with baited breath..
Dave
Yes and I will post the settings file in the next vid. A lot going on right now!
Jes Well actually quite a lot changed. As a general rule I try to avoid any form of unpleasantness and simply keep away from it. I did report the fault and the only thing I heard from Dankers was a personal character assassination because I accepted a free board from someone who I have only met once in my life who Dankers fell out with. (Seemingly amongst many others as well). Apart from that I was a paying customer who tried to offer some input to the general cause. I will send you the private post if you like. But I don't take that **** from anyone. Shame as I like what james has been doing. Crash very kindly offered to repair the boards for me, so I have not entirely given up with CC as it does have some potential. I do recall dankers saying something along the lines that he would have people (possibly you) watching my comments in case I had nothing better to do than spend all day long running him down. Is he not his own worst enemy!Denny -
Admittedly I haven't tracked back over every post you've made in the last few months but I'm puzzled: I recall reading a very enthusiastic post from you, reporting that CC had "great" potential as a dedicated IMU. What changed?
Also, every report I recall of CC board "natural death" concluded with Dankers sending a free replacement to the user concerned.
")
Yeah I think a lot of good stuff is on the way. I think Jason Short has also taken the bull by the horns with AC which is starting to look very good. I am working on hollow shaft direct drive PCB motors for small camera mounts with sensors built in to the board. Currently building an autoclave for the prepreg carbon stuff. wet layup sucks.That was an unfortunate episode/situation, best forgotten. Dankers is frazzled, for sure - who wouldn't be in his situation?
You obviously have a great deal of valuable experience and I hope you'll continue to share it here, on the OP forums, wherever. I'm still looking forward to the next video
Right now my own project is focussing on the mechanical aspects of gimbal design - backlash, stiffness, vibration, etc. - once I've got that sorted I'll be playing with the control.
P.S. Remember that CC is just the first output of the OP project - what's coming down the pipeline is seriously exciting! :strawberry:
unfortunately the OP guys have all but disappeared from this site (except the rare appearance of Matwelli). i can offer commentary on that situation but i won't.
I have been thinking about trying the same thing one day since the WooKong doesn't have so many outputs.
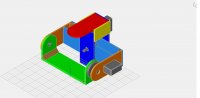
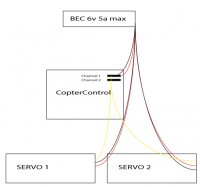
Sorry guys for the basic question but i am just getting into the whole CC boards configs and i would like to use the CC boards for stabilizing my AV 130.
Is my approach in the diagram possible or does the CC board need a RX hooked up to it or anything else that it would provide the servos signals for stabilization ?
Thanks
Boris
View attachment 2854
Sorry man, but since there's only maybe one OP related post here a month it's hard to keep up. And since you don't like us cross-linking to the OP-forums it's extra hard to point out places where things have been discussed before.
Yeah this should be easy to achieve. You could either put CC on the main frame and use the camera stabilization as normal. Alternatively you could put it on the camera itself and then use rate or attitude mode. You'll have to fake a few things to make it happy since it's an unusual configuration. I assume you'd plug a receiver in so you'd just want to identify all five channel (throttle, roll, pitch, yaw, flight mode).
I would start with mounting it on the main frame myself, I'm not convinced being on the camera would give more precision.