Here is another test video. This is an example of a "typical flight". Nice and slow. I flew around the park right next to our house (near downtown Houston TX). I haven't changed any settings yet on the gimbal or Hoverfly controller from my previous test flight(s), and same crappy camera. I took the raw footage and ran it through Sony vegas stabilizer @ 10% to remove the roll bounce I am getting.
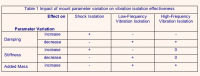
This coming week I plan to begin working on my horizon (roll gain) setting in the HFC and dissassembling the gimbal to add additional members for rigidity. I ordered 4 vibration ball mounts to replace the rubber grommets I am using. http://www.barrycontrols.com/products/product.cfm?cid=7&fid=36 I don't think my grommets are really doing anything and I am sure vibrations are making it down to my gimbal which doesn't help my roll bounce issue.
https://dl.dropbox.com/u/91287103/HEX 4.wmv
This coming week I plan to begin working on my horizon (roll gain) setting in the HFC and dissassembling the gimbal to add additional members for rigidity. I ordered 4 vibration ball mounts to replace the rubber grommets I am using. http://www.barrycontrols.com/products/product.cfm?cid=7&fid=36 I don't think my grommets are really doing anything and I am sure vibrations are making it down to my gimbal which doesn't help my roll bounce issue.
https://dl.dropbox.com/u/91287103/HEX 4.wmv
") ). I think that you tilt is spot on and the roll is 95% there. I did notice the vibes a bit, but get a better camera on there before you chase all of your vibe issues. Especially if the camera you will be using is heavier. How are you vibe isolating at the moment? Are you using the grommets in tension or compression?
). I think that you tilt is spot on and the roll is 95% there. I did notice the vibes a bit, but get a better camera on there before you chase all of your vibe issues. Especially if the camera you will be using is heavier. How are you vibe isolating at the moment? Are you using the grommets in tension or compression?