econfly
Member
I am in the early stages of building a copter to lift my MōVI M5. With solid knowledge of the weight of the M5 and cameras I plan to fly, as well as a general idea of all-up weight, I have started to look at motors. This is a description of that process and what I have concluded so far.
This examination is limited to KDE and T-Motor. I have had good luck with T-Motor in past builds. KDE stands out as a high quality option, and, as we will see, their specs are impressive.
In what may seem as a backwards way to do things, I've decided on using DJI's 1552 folding props in what will almost surely be an X8 build. I reviewed these props about a year ago and still find them appealing. They are efficient for a folding prop, durable, and very cost effective. The convenience of a folding prop is appealing, and these folders remain one of the best options out there. As a plus, rough estimations indicate a nice match between these folders and an X8 build for my needs. Finally, KDE offers a nice mounting option for these and other folding props.
Comparing motor specifications, particularly from one vendor to another, is not easy. Data points don't line up for easy comparison. Makers tend to report results for various throttle levels, and that means you can't easily compare efficiency (thrust vs. watts) at desired power levels. At the same time, reported specs are based on a given propeller, and one maker's "15 x 5" prop may not be the same one used by another.
Thankfully, both T-Motor and KDE report values for a series of motors using "15 x 5" props and 6s power. With a little work we can learn a lot about the competing options. The motors I am considering are:
To begin, I want to do a comparison that has nothing to do with motors. To make certain later comparisons are as fair as possible, I compare KDE and T-Motor values for thrust vs RPM. This is all about the prop used in the testing. Whether a given prop is spun by one motor or another, or a hamster on a wheel, the resulting thrust should be directly related to RPM. If KDE and T-Motor are using comparable "15 x 5" props in testing then we should see obvious similarity in reported thrust for any given RPM. Here are results I gathered from the published motor specs:
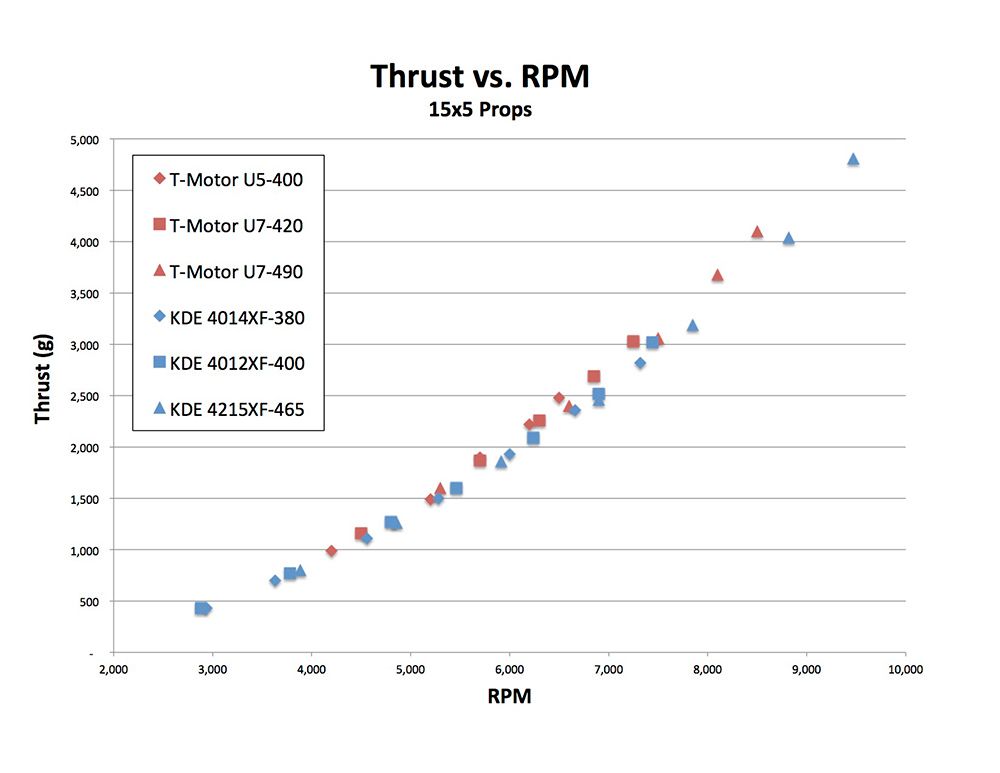
This is very encouraging. Over the six motors considered we see a nice curve of thrust vs. RPM. T-Motor is reporting very slightly higher values of thrust, but roughly speaking we can see that over all motors there is a fairly consistent relationship between thrust and RPM. This tells us that T-Motor and KDE are using very similar (if not the same) "15 x 5" props in their motor testing. Hence, we can compare specs among these motors without the complication of adjusting for differences in props under test.
The key consideration when picking a motor is thrust per watt within the desired thrust range. For any given level of power (watts) we want as much thrust as possible. Prop design can be a big factor, but we have eliminated that variable above. Here is thrust vs. watts for the six motors:
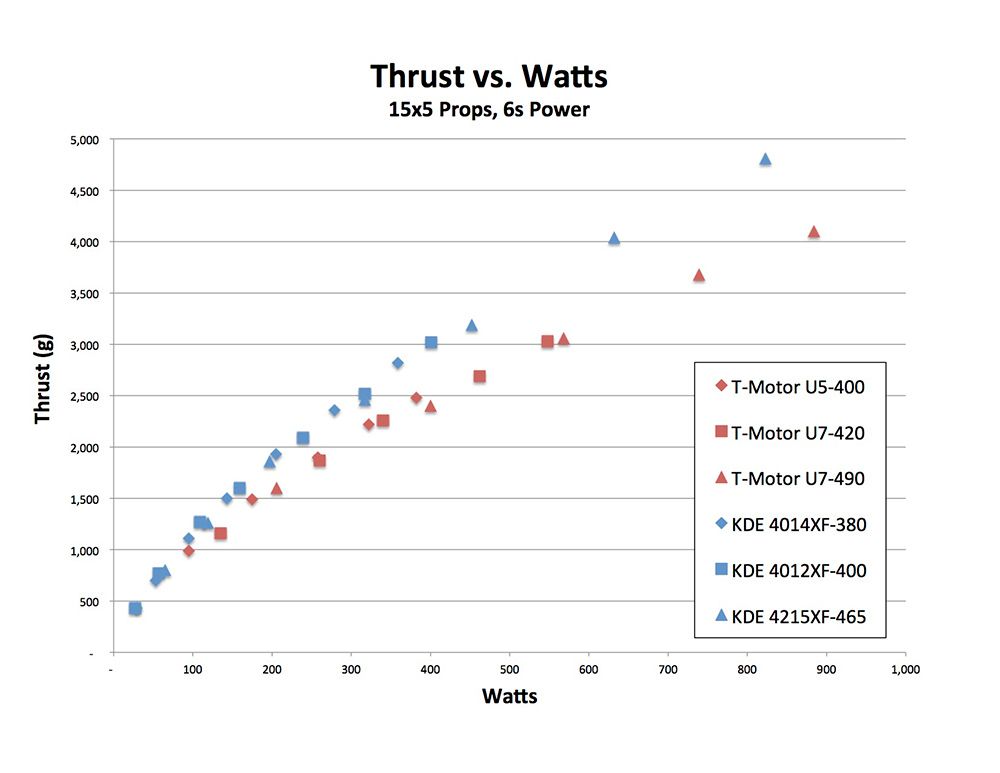
What to make of this? Over all six motors we see above a very big advantage for KDE. For any given level of power the KDE motors are reported to produce more thrust -- that means more efficiency and longer flight times. This difference is not trivial. I estimate that KDE is reporting about 20% more thrust over the entire thrust curve for their motors vs. T-Motor's reported values. And keep in mind this is not about the prop. In fact, above we found that, if anything, T-Motor is reporting a little bit more thrust for any given RPM. This huge efficiency advantage reported by KDE is based entirely on the motors.
To be very clear: This is not based on my testing. Everything here is coming from published motor specifications on KDE's and T-Motor's web pages linked above. The raw data I collected are below.
Based on these results I am leaning toward the KDE 4215XF-465. I may pick up a T-Motor U7-490 for a head-to-head comparison. Is KDE really this much better than T-Motor at designing and building a motor? Perhaps. If their specs are accurate KDE is producing some extremely impressive results.
UPDATE - TESTING COMPLETE
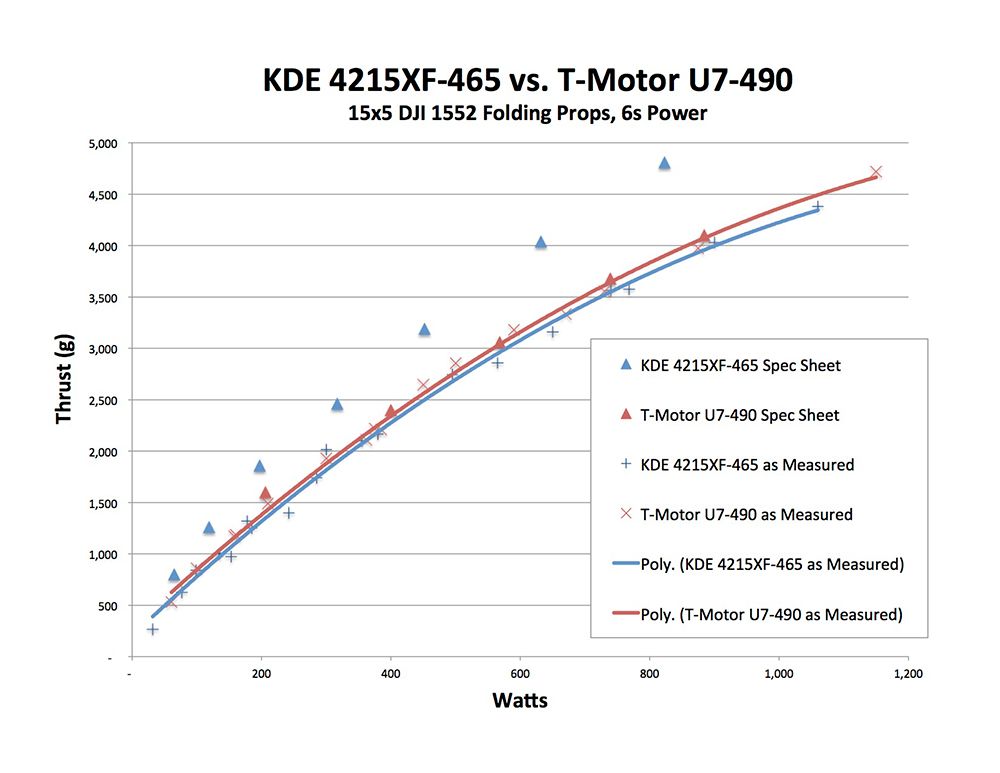
Here is the comparison of thrust vs. watts for the KDE 4215XF-465 and T-Motor U7-490. This is with the KDE folding prop bracket, DJI 1552 15 x 5 props, and recommended ESCs (KDE 55+ for the 4215, and T-Motor T80A for the U7-490).
In sum, these motors are extremely close in performance using the 15 x 5 folders. KDE's efficiency claims are absolutely nonsense. Yet, their motor does a very nice job, and only yields slightly to the larger U7 at the high end of the thrust curve.
Superficially, the U7 is massive compared to the KDE 4215. It and its ESC are about 65 grams heavier than the KDE system. The U7 is 4mm taller, and 12-13mm wider.
Both motors appear to be very well constructed. I may post a teardown later if I can find time.
I found the KDE motor/ESC combination to be much more responsive in my tests. Dialing in PWM throttle values resulted in nearly instant reaction for the KDE motor while the U7 motor/ESC system had a slower response and tended to ramp up/down to changes in throttle signal.
For my intended use -- 15 or 16 inch props and all-up weight around 12-14 kg in an X8 setup -- both of these motors provide plenty of thrust and should result in a hover right at 50% throttle.
Both motors sell for right around $150. Given the nearly identical thrust performance with 15" props, for my purposes the superior response of the KDE motor along with its more compact size make it the likely winner.
However, I am very unhappy with KDE's specifications for the motor. As can be seen in the graph, T-Motor provides very accurate and practical information on their motor's performance. KDE, on the other hand, does not provide accurate information.
I calibrated my thrust meter prior to testing. My power measurement process is very accurate. Yet even if my process were flawed, shifting performance one way or another, both motors were tested equally. Despite KDE's claimed performance advantage, both motors performed similarly and right along the path provided by T-Motor's specs.
This examination is limited to KDE and T-Motor. I have had good luck with T-Motor in past builds. KDE stands out as a high quality option, and, as we will see, their specs are impressive.
In what may seem as a backwards way to do things, I've decided on using DJI's 1552 folding props in what will almost surely be an X8 build. I reviewed these props about a year ago and still find them appealing. They are efficient for a folding prop, durable, and very cost effective. The convenience of a folding prop is appealing, and these folders remain one of the best options out there. As a plus, rough estimations indicate a nice match between these folders and an X8 build for my needs. Finally, KDE offers a nice mounting option for these and other folding props.
Comparing motor specifications, particularly from one vendor to another, is not easy. Data points don't line up for easy comparison. Makers tend to report results for various throttle levels, and that means you can't easily compare efficiency (thrust vs. watts) at desired power levels. At the same time, reported specs are based on a given propeller, and one maker's "15 x 5" prop may not be the same one used by another.
Thankfully, both T-Motor and KDE report values for a series of motors using "15 x 5" props and 6s power. With a little work we can learn a lot about the competing options. The motors I am considering are:
To begin, I want to do a comparison that has nothing to do with motors. To make certain later comparisons are as fair as possible, I compare KDE and T-Motor values for thrust vs RPM. This is all about the prop used in the testing. Whether a given prop is spun by one motor or another, or a hamster on a wheel, the resulting thrust should be directly related to RPM. If KDE and T-Motor are using comparable "15 x 5" props in testing then we should see obvious similarity in reported thrust for any given RPM. Here are results I gathered from the published motor specs:
This is very encouraging. Over the six motors considered we see a nice curve of thrust vs. RPM. T-Motor is reporting very slightly higher values of thrust, but roughly speaking we can see that over all motors there is a fairly consistent relationship between thrust and RPM. This tells us that T-Motor and KDE are using very similar (if not the same) "15 x 5" props in their motor testing. Hence, we can compare specs among these motors without the complication of adjusting for differences in props under test.
The key consideration when picking a motor is thrust per watt within the desired thrust range. For any given level of power (watts) we want as much thrust as possible. Prop design can be a big factor, but we have eliminated that variable above. Here is thrust vs. watts for the six motors:
What to make of this? Over all six motors we see above a very big advantage for KDE. For any given level of power the KDE motors are reported to produce more thrust -- that means more efficiency and longer flight times. This difference is not trivial. I estimate that KDE is reporting about 20% more thrust over the entire thrust curve for their motors vs. T-Motor's reported values. And keep in mind this is not about the prop. In fact, above we found that, if anything, T-Motor is reporting a little bit more thrust for any given RPM. This huge efficiency advantage reported by KDE is based entirely on the motors.
To be very clear: This is not based on my testing. Everything here is coming from published motor specifications on KDE's and T-Motor's web pages linked above. The raw data I collected are below.
Based on these results I am leaning toward the KDE 4215XF-465. I may pick up a T-Motor U7-490 for a head-to-head comparison. Is KDE really this much better than T-Motor at designing and building a motor? Perhaps. If their specs are accurate KDE is producing some extremely impressive results.
Code:
Make Motor Watts RPM Thrust
T-Motor U5-400 95 4,200 990
T-Motor U5-400 175 5,200 1,490
T-Motor U5-400 258 5,700 1,900
T-Motor U5-400 322 6,200 2,220
T-Motor U5-400 382 6,500 2,480
T-Motor U7-420 135 4,500 1,160
T-Motor U7-420 260 5,700 1,870
T-Motor U7-420 340 6,300 2,260
T-Motor U7-420 462 6,850 2,690
T-Motor U7-420 548 7,250 3,030
T-Motor U7-490 206 5,300 1,600
T-Motor U7-490 400 6,600 2,400
T-Motor U7-490 568 7,500 3,060
T-Motor U7-490 739 8,100 3,680
T-Motor U7-490 884 8,500 4,100
KDE 4014XF-380 29 2,940 430
KDE 4014XF-380 53 3,630 700
KDE 4014XF-380 95 4,560 1,110
KDE 4014XF-380 143 5,280 1,500
KDE 4014XF-380 205 6,000 1,930
KDE 4014XF-380 279 6,660 2,360
KDE 4014XF-380 359 7,320 2,820
KDE 4012XF-400 27 2,880 430
KDE 4012XF-400 57 3,780 770
KDE 4012XF-400 109 4,800 1,270
KDE 4012XF-400 159 5,460 1,600
KDE 4012XF-400 239 6,240 2,090
KDE 4012XF-400 317 6,900 2,520
KDE 4012XF-400 401 7,440 3,020
KDE 4215XF-465 65 3,885 800
KDE 4215XF-465 119 4,860 1,260
KDE 4215XF-465 197 5,915 1,860
KDE 4215XF-465 317 6,900 2,460
KDE 4215XF-465 452 7,850 3,190
KDE 4215XF-465 632 8,820 4,040
KDE 4215XF-465 823 9,470 4,810UPDATE - TESTING COMPLETE
Here is the comparison of thrust vs. watts for the KDE 4215XF-465 and T-Motor U7-490. This is with the KDE folding prop bracket, DJI 1552 15 x 5 props, and recommended ESCs (KDE 55+ for the 4215, and T-Motor T80A for the U7-490).
In sum, these motors are extremely close in performance using the 15 x 5 folders. KDE's efficiency claims are absolutely nonsense. Yet, their motor does a very nice job, and only yields slightly to the larger U7 at the high end of the thrust curve.
Superficially, the U7 is massive compared to the KDE 4215. It and its ESC are about 65 grams heavier than the KDE system. The U7 is 4mm taller, and 12-13mm wider.
Both motors appear to be very well constructed. I may post a teardown later if I can find time.
I found the KDE motor/ESC combination to be much more responsive in my tests. Dialing in PWM throttle values resulted in nearly instant reaction for the KDE motor while the U7 motor/ESC system had a slower response and tended to ramp up/down to changes in throttle signal.
For my intended use -- 15 or 16 inch props and all-up weight around 12-14 kg in an X8 setup -- both of these motors provide plenty of thrust and should result in a hover right at 50% throttle.
Both motors sell for right around $150. Given the nearly identical thrust performance with 15" props, for my purposes the superior response of the KDE motor along with its more compact size make it the likely winner.
However, I am very unhappy with KDE's specifications for the motor. As can be seen in the graph, T-Motor provides very accurate and practical information on their motor's performance. KDE, on the other hand, does not provide accurate information.
I calibrated my thrust meter prior to testing. My power measurement process is very accurate. Yet even if my process were flawed, shifting performance one way or another, both motors were tested equally. Despite KDE's claimed performance advantage, both motors performed similarly and right along the path provided by T-Motor's specs.
Last edited by a moderator:
")