OK, so now for a few more questions.
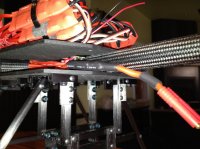
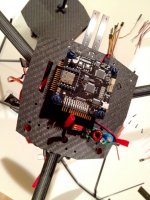
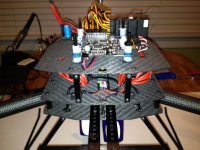
the first concerns a DPCAV power filter. I have it mounted to the control deck (which is made of carbon fiber) with nylon zip ties. Sandwiched between the filter and the carbon fiber deck are two flattened pieces of heat shrink tubing (unshrunk) for insulation (carbon fiber conducts electricity, although I don't know how good of a conductor it is). Is this setup OK? All solder joints are insulated with heat shrink. I'm almost positive that nylon is not conductive, but I'm surprised by facts every day that contradict my assumptions. Here's a photo of the control deck of the craft, fyi:
View attachment 11508
Although I have a Hoverfly Pro black board, I'm still using the DPCAV filter, just to be safe. I've also wired a second female plug to the OUT side, as I may need this to power my video transmitter (more questions on this later).
Next question: I have a JR X9503 transmitter and a JR R921 receiver. 9 channels. I have the Hoverfly Pro board with the HoverGPS mated to it. The entire stack is mounted on the control deck (photo above). In my design, I was able to figure out how to put in the "FAA lighting system" I got from HobbyKing where I have landing skid tip lights. It's really cool, but I didn't want to have it always on - required a separate BEC and I wanted the possibility to turn on and off in flight. I have it set up to go into the AUX4 port on the receiver. I just want to make sure that by using this port I'm not utilizing the lights at the cost of a far more important function of the Hoverfly Pro / GPS combined system. On Page 28 of the Hoverfly GPS manual, they show all receiver ports / HFP interfaces; a total of eight (with camera tilt - which I'll be using). So it seems like I'm OK using the AUX 4 port for the lights, and will still have full functionality of the HF system. Or am I overlooking something?
Next question: While I haven't yet connected the receiver to the Hoverfly Pro, I have the interconnecting cables plugged into the receiver. I'll of course connect the cables to the Hoverfly Pro in the orientation they show on page 28 of the GPS manual (Ground on left, power in middle, and signal on right). I have the cables plugged into the receiver with ground on top (I take it that the top of the unit is the side where the antenna lights are located and the port names are printed as well as the name of the unit). Again - I'm sure this is a dumb question to those who do this all the time, but I can't take anything for granted. I'm not sure if polarity matters with this unit, but if it does, then should I have them cables plugged in with negative on top, or with signal on top?
Next (and last - for now):
I'm getting very close to powering the Hoverfly controller for the first time. Before doing this I'm going to download the firmware client to flash the system with the latest firmware. I'll be re-reading the Hoverfly Pro manual before doing any of this, but to get started, I was wondering if the first time that the main board is flashed if it is OK to have the two units mated? Is it OK to power them for the first time when they are mated? Or do I need to first configure the Hoverfly Pro, and then mount the GPS? I'd rather keep them connected, flash each with the latest firmware, and then power them on for the first time already mated together - it will save time. I really appreciate any other advice on this aspect of the setup.
Thank you very much in advance for advice.
Best,
Ed