Motopreserve
Drone Enthusiast
What's up folks? I've been busy toiling away on a couple projects, not least of which is reviewing the DJI Phantom 2 for the multirotorforums.com product reviews section. So time has been spread thin, but I have had a chance to work on a hex I've had in the works.
After building up the CineTank and flying that for a while, I had to admit to myself that the footage I'd like to eventually get would best be served by a copter capable of lifting the camera/gimbal load more easily. The CineTank gets great footage with the camera strapped to the clean plate, but I would be force fitting a gimbal on there, so it was best to settle on 2 different MRs. My ultimate goal is to capture some motorcycle riding footage using the GoPro at first, and eventually a Sony Nex5 I have (BTW: great camera for tucking in a moto tank bag).
I began a massive research phase which resulted in the choice to build a hex, based on the Tarot 680Pro frame. This build has not been without its headaches, in fact worse than any other I've done so far. So maybe the trials and tribulations will help someone else down the road...
The following parts are the basis of the build:
Tarot 680Pro
SuperX FC
SunnySky 3508-20 580kv motors
HobbyWing Platinum Pro 30A OPTO ESC (**2nd choice - see below**)
Taranis X9D Tx
FrSky X8R Rx
Various FrSky telemetry modules
It was a fairly quick decision to choose Tarot. Their frames are well reviewed, and prices are much lower than a lot of the competition. They fold, which was a must for me, and the fact that I could find the frames here in the USA also influenced my decision. In fact, all parts were sourced from the US, shipping balancing out the higher costs versus the Chinese vendors. The first hurdle was deciding between the Tarot 6xx mm size frames. I knew it needed to be a hex, so the 650 was out. But they offer no less than 3 frames in the 680-690 size range, and I went 'round and 'round trying to determine what would work best for this build. The original 680 frame is still available, but most reports insisted that the folding mechanisms, as well as the motor mounts on the newer 680Pro were improved. Following the 680, Tarot released a 690 size frame which had a few improvements, but then released the 680Pro which carried the 690 benefits, but with an integrated PDB plate. Of course the inclusion of the PDB came at a weight cost, clouding the decision even further. Whew! So many choices, so much to consider...
Finally I opted for the 680Pro for the improvements, as well as what I considered to be the ease of using an integrated PDB. Decision made, let's move on...
There are some build threads out there with specific component choices for this frame that were getting 15-20 minute flight times. I assumed if I stuck close to those parts lists, I would have a heavy lifter hex capable of keeping me in the air long enough to get the shots I needed. The list above was decided upon by research and some math.
The first glitch: I initially ordered ESCs from Witespy, 6 SimonK Opto blue series with the filtering removed, which is supposed to be an improvement for the lower Kv, high pole/magnet count (pancake) style motors. Problem was: A) they were from Witespy with his notoriously slow shipping, and B) I began to read more and more about issues arising from using SimonK firmware on pancake motors. It seems people experience cogging when the Esc/Motor combo goes out of sync. I can't tell you how many threads I read that stated something like: "it SHOULD work," or "I don't THINK there will be a problem." Not exactly confidence inspiring. So I started to scramble to find an ESC that would work with these SunnySky motors, right out of the gate. Finally I decided on the HobbyWing Platinum Pro - partially based on reviews here, and also the fact that one build I was referencing was using this exact combo. The order for the new ESCs was placed...

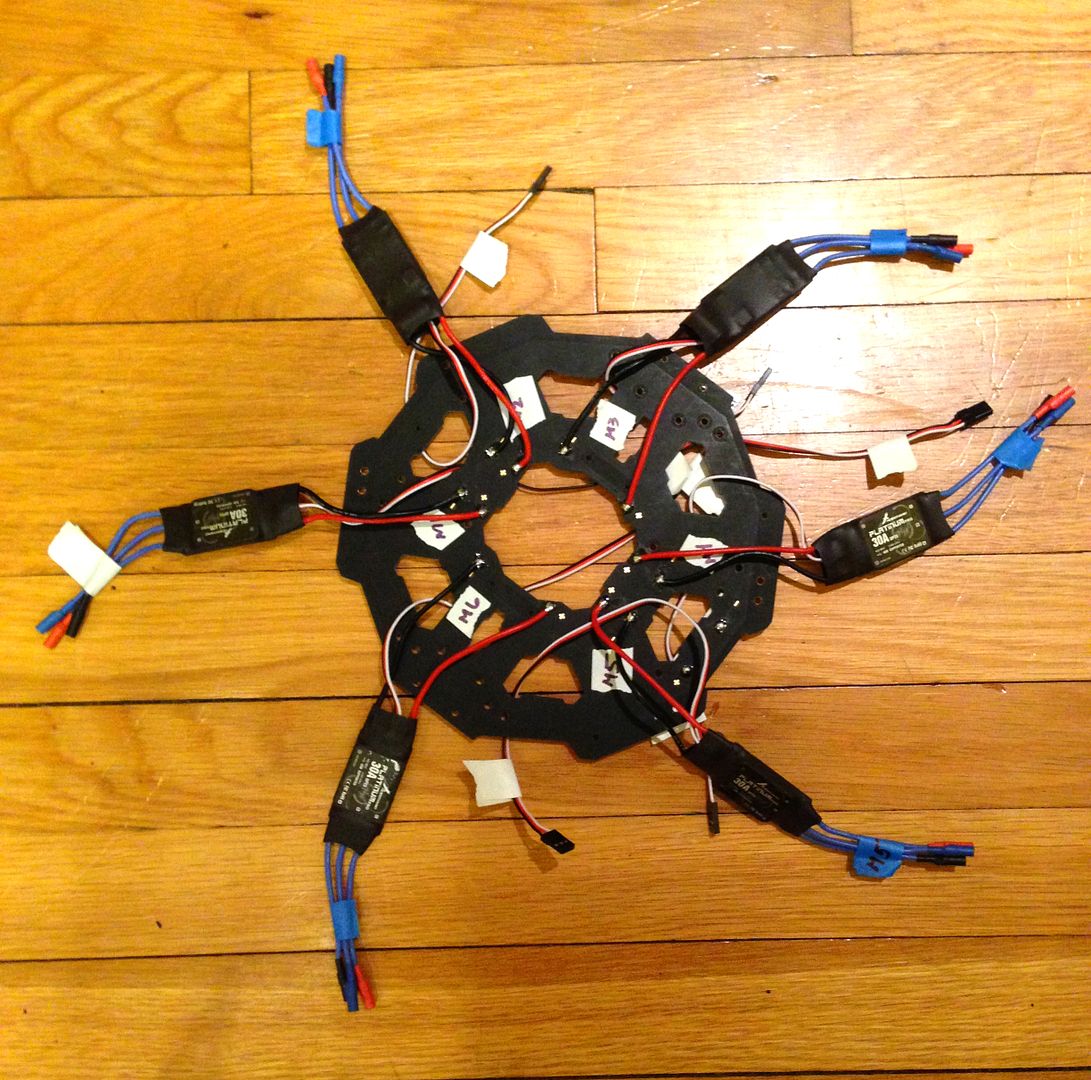
Once all the parts arrived, I got to work assembling the frame, and readying it for the components. After building 2 frames with an integrated PDB, I can now say that I prefer using a "squid" or 3rd party PDB. I feel hemmed in by the location of the pads you must use for the integrated PDB, and I found myself making choices for parts placement in areas I wasn't comfortable with. On paper, the addition of the integrated PDB is appealing, but in practice, for me it limits (or at least steers) my choices.
This is the first time that I have used the pancake style motors, and they are so much larger than you imagine when you see them in photos. Getting them onto the motor mounts was no problem though...


For the record, I learned to make a proper braid for this build. The motor wires for the SunnySky came in at 60cm, far more than I needed. I felt like a school girl twisting the damn things...

To be continued...
After building up the CineTank and flying that for a while, I had to admit to myself that the footage I'd like to eventually get would best be served by a copter capable of lifting the camera/gimbal load more easily. The CineTank gets great footage with the camera strapped to the clean plate, but I would be force fitting a gimbal on there, so it was best to settle on 2 different MRs. My ultimate goal is to capture some motorcycle riding footage using the GoPro at first, and eventually a Sony Nex5 I have (BTW: great camera for tucking in a moto tank bag).
I began a massive research phase which resulted in the choice to build a hex, based on the Tarot 680Pro frame. This build has not been without its headaches, in fact worse than any other I've done so far. So maybe the trials and tribulations will help someone else down the road...
The following parts are the basis of the build:
Tarot 680Pro
SuperX FC
SunnySky 3508-20 580kv motors
HobbyWing Platinum Pro 30A OPTO ESC (**2nd choice - see below**)
Taranis X9D Tx
FrSky X8R Rx
Various FrSky telemetry modules
It was a fairly quick decision to choose Tarot. Their frames are well reviewed, and prices are much lower than a lot of the competition. They fold, which was a must for me, and the fact that I could find the frames here in the USA also influenced my decision. In fact, all parts were sourced from the US, shipping balancing out the higher costs versus the Chinese vendors. The first hurdle was deciding between the Tarot 6xx mm size frames. I knew it needed to be a hex, so the 650 was out. But they offer no less than 3 frames in the 680-690 size range, and I went 'round and 'round trying to determine what would work best for this build. The original 680 frame is still available, but most reports insisted that the folding mechanisms, as well as the motor mounts on the newer 680Pro were improved. Following the 680, Tarot released a 690 size frame which had a few improvements, but then released the 680Pro which carried the 690 benefits, but with an integrated PDB plate. Of course the inclusion of the PDB came at a weight cost, clouding the decision even further. Whew! So many choices, so much to consider...
Finally I opted for the 680Pro for the improvements, as well as what I considered to be the ease of using an integrated PDB. Decision made, let's move on...
There are some build threads out there with specific component choices for this frame that were getting 15-20 minute flight times. I assumed if I stuck close to those parts lists, I would have a heavy lifter hex capable of keeping me in the air long enough to get the shots I needed. The list above was decided upon by research and some math.
The first glitch: I initially ordered ESCs from Witespy, 6 SimonK Opto blue series with the filtering removed, which is supposed to be an improvement for the lower Kv, high pole/magnet count (pancake) style motors. Problem was: A) they were from Witespy with his notoriously slow shipping, and B) I began to read more and more about issues arising from using SimonK firmware on pancake motors. It seems people experience cogging when the Esc/Motor combo goes out of sync. I can't tell you how many threads I read that stated something like: "it SHOULD work," or "I don't THINK there will be a problem." Not exactly confidence inspiring. So I started to scramble to find an ESC that would work with these SunnySky motors, right out of the gate. Finally I decided on the HobbyWing Platinum Pro - partially based on reviews here, and also the fact that one build I was referencing was using this exact combo. The order for the new ESCs was placed...

Once all the parts arrived, I got to work assembling the frame, and readying it for the components. After building 2 frames with an integrated PDB, I can now say that I prefer using a "squid" or 3rd party PDB. I feel hemmed in by the location of the pads you must use for the integrated PDB, and I found myself making choices for parts placement in areas I wasn't comfortable with. On paper, the addition of the integrated PDB is appealing, but in practice, for me it limits (or at least steers) my choices.

This is the first time that I have used the pancake style motors, and they are so much larger than you imagine when you see them in photos. Getting them onto the motor mounts was no problem though...


For the record, I learned to make a proper braid for this build. The motor wires for the SunnySky came in at 60cm, far more than I needed. I felt like a school girl twisting the damn things...

To be continued...






")