It is possible to see a shadow of the Ecilop on the
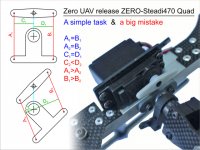
presentation of the ZERO-Stead470 :
View attachment 6935
And there are some reasons for it:
View attachment 6936
That is why the gimbal of the zero can not be tilted in proper way.
There are more of mistakes.
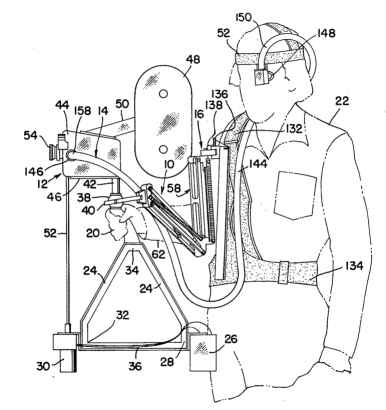
Let's try an experimental explanation based on the Ecilop frame:
Take ECILOP Easy,
Connect the gyros to the receiver directly to get a constant input,
Place the ROLL gyro on the tiltable part of the gimbal,
Now two gyros are placed together like in a single block,
Tilt the gimbal forward 45 degree or more,
Turn on record,
Turn around with your drone to film a panorama quickly,
Roll-servo will tilt the camera sideward due to mistaken signal from the tilted gyro.
Roll-Error depends on the speed of pan-rotation when gimbal is tilted forward or backward.
That's why it's not good to use a single block on the tiltable part, like zero-guys do.
Ecilop in a "zero" presentations:
View attachment 6937 View attachment 6938


")