Hi all, I am new here and have been following the threads here and on rcgroups with a lot of interest and based on all the info you guys have given I ordered a SuperX pro from Philippe last week and flew it for the first time yesterday. I have one or two queries on the system.
Bit of background quick. I have a Steadidrone Ei8ht Octo which I built up and flew with Arducopter 3.0.1 3 weeks ago and had a complete loss of control full throttle flyaway on the second flight. Needless to say that was pretty crap, but fortunately I was on my Dad's farm so the octo crashed 'fairly' harmlessly several hundred metres away and was easy to find and repair. I stripped the whole thing down and rebuilt from the ground up, so it's as new. At the same time I started researching a replacement flight controller and settled on the SuperX.
My first few flights yesterday which were just basically take-off and land exercises were very confidence inspiring after the last experience and the SuperX is great. Rock solid, so easy to set up, straightforward and just an all-round good experience. - I'm very very happy with it.
My several questions are as follows and if anyone can give me any info on this I'd appreciate it (info on my components and setup at the end of this and here are my flight logs: http://www.xaircraft.com/blackbox/bl...750_10.4.01.26 - the 10. logs are the relevant ones):
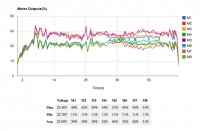
1. After my flights I checked out my flight logs and all looks pretty much as expected except for my motor outputs. All the odd motors (1, 3, 5 and 7) were running at about 10% higher output on all flights. The octo was totally stable pretty much all the time though except when I was adjusting the gain knob. In this post - http://goo.gl/XRXgxe - a guy crashed his drone with SuperX installed and based on Jingchen's feedback his M2/M4 were running higher which indicated misalignment. I checked before I flew and double checked since seeing the logs and I definitely have all my motors mounted perfectly level and at the same distance from the copter's axis. Each motor is running either a clockwise or anticlockwise APM 14 x 4.7. Any ideas on what could be causing this difference in motor outputs?
View attachment 14535
2. What is a reasonable amount of vibration to expect from a well balanced octo? On my logs, the vibration levels peak at about 0.8g which seems high.
3. In the logs, what does Gyro Angle Rate tell you?
4. Do any of you set up Expo on you transmitters? I think I've read somewhere that there shouldn't be any set up, but yesterday I found that the one click between hover at 50% and beginning to descend was a tad too much less throttle...
Edit: 5. I've seen some people strongly advise disconnecting the +ve leads from the ESCs for motors 7 & 8... Is this really important?
Any feedback on this would be greatly appreciated!
Thanks a lot in advance. Matt.
PS these queries are duplicated on rcgroups.
My octo is about an 1100mm running 8 T-Motor MN4014 with APC 14 x 4.7 props through Turnigy Plush 40A ESCs all setup based on the recommended settings, using 2 x 6200mah 6s batteries and my Transmitter/Receiver combo is the Hitec Aurora 9 with Optima 9.
Bit of background quick. I have a Steadidrone Ei8ht Octo which I built up and flew with Arducopter 3.0.1 3 weeks ago and had a complete loss of control full throttle flyaway on the second flight. Needless to say that was pretty crap, but fortunately I was on my Dad's farm so the octo crashed 'fairly' harmlessly several hundred metres away and was easy to find and repair. I stripped the whole thing down and rebuilt from the ground up, so it's as new. At the same time I started researching a replacement flight controller and settled on the SuperX.
My first few flights yesterday which were just basically take-off and land exercises were very confidence inspiring after the last experience and the SuperX is great. Rock solid, so easy to set up, straightforward and just an all-round good experience. - I'm very very happy with it.
My several questions are as follows and if anyone can give me any info on this I'd appreciate it (info on my components and setup at the end of this and here are my flight logs: http://www.xaircraft.com/blackbox/bl...750_10.4.01.26 - the 10. logs are the relevant ones):
1. After my flights I checked out my flight logs and all looks pretty much as expected except for my motor outputs. All the odd motors (1, 3, 5 and 7) were running at about 10% higher output on all flights. The octo was totally stable pretty much all the time though except when I was adjusting the gain knob. In this post - http://goo.gl/XRXgxe - a guy crashed his drone with SuperX installed and based on Jingchen's feedback his M2/M4 were running higher which indicated misalignment. I checked before I flew and double checked since seeing the logs and I definitely have all my motors mounted perfectly level and at the same distance from the copter's axis. Each motor is running either a clockwise or anticlockwise APM 14 x 4.7. Any ideas on what could be causing this difference in motor outputs?
View attachment 14535
2. What is a reasonable amount of vibration to expect from a well balanced octo? On my logs, the vibration levels peak at about 0.8g which seems high.
3. In the logs, what does Gyro Angle Rate tell you?
4. Do any of you set up Expo on you transmitters? I think I've read somewhere that there shouldn't be any set up, but yesterday I found that the one click between hover at 50% and beginning to descend was a tad too much less throttle...
Edit: 5. I've seen some people strongly advise disconnecting the +ve leads from the ESCs for motors 7 & 8... Is this really important?
Any feedback on this would be greatly appreciated!
Thanks a lot in advance. Matt.
PS these queries are duplicated on rcgroups.
My octo is about an 1100mm running 8 T-Motor MN4014 with APC 14 x 4.7 props through Turnigy Plush 40A ESCs all setup based on the recommended settings, using 2 x 6200mah 6s batteries and my Transmitter/Receiver combo is the Hitec Aurora 9 with Optima 9.