Hello Community, i just had a strange problem with my new EVO/A2 in gps mode.
First i calibrated. The start was no problem, gained hight and started forward - than very fast it flip to one side app.40 degrees and recovered fast by it self - than it hovered and rotated fine - started sideways and the same thing happen again. Than i switched to Atti mode and everything looked fine - but i have to admit after this freak behavior i was rather careful on the sticks - so before i go up again, i would like to have your opinion please.
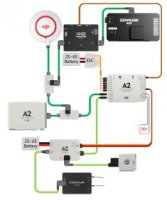
setup:
2x6s batteries mount to the center (no gimbal yet)
IMU set outside the center on the black plate between the landing gear frame.
OSD over a tbs69 with a 25mw immersion transmitter
Gain as recommended in the A2 manual it subtracted 20 of each because the copter weight is 5kg and not 7kg -- (maybe tis is wrong) is it not better to start with everything 100% and tune later?
View attachment 14627View attachment 14628
Thank you in advance for your time and help!
oh, i see - the first picture is rather smal ... the gains where basic 120 120 110 attitude 120 120 110
::
First i calibrated. The start was no problem, gained hight and started forward - than very fast it flip to one side app.40 degrees and recovered fast by it self - than it hovered and rotated fine - started sideways and the same thing happen again. Than i switched to Atti mode and everything looked fine - but i have to admit after this freak behavior i was rather careful on the sticks - so before i go up again, i would like to have your opinion please.
setup:
2x6s batteries mount to the center (no gimbal yet)
IMU set outside the center on the black plate between the landing gear frame.
OSD over a tbs69 with a 25mw immersion transmitter
Gain as recommended in the A2 manual it subtracted 20 of each because the copter weight is 5kg and not 7kg -- (maybe tis is wrong) is it not better to start with everything 100% and tune later?
View attachment 14627View attachment 14628
Thank you in advance for your time and help!
oh, i see - the first picture is rather smal ... the gains where basic 120 120 110 attitude 120 120 110
::
Attachments

![Foto[2].jpg](/forums/data/attachments/14/14670-09e9f65b9013a9eceb296ff0a8c9e245.jpg)
Last edited by a moderator:


") (the anti-vibrating rubber things) ... this i the with the 2 batteries the gravity center in Z right ? this way with z= 0 the position of my IMU was correct...?
(the anti-vibrating rubber things) ... this i the with the 2 batteries the gravity center in Z right ? this way with z= 0 the position of my IMU was correct...?