Alright, here are some graphs from this experience that I think are relevant.
I was initially in Stabilize, but took off in Loiter. Once it SEEMED to be climbing inexplicably even with 0 throttle I put it back into Stabilize. This is evident in the Alt (Yellow) vs. DAlt (Desired altitude, Orange). See the altitude climb with the desired altitude, then when I hit Stabilize the motors shut off completely since the throttle was at or near 0. This is corroborated by desired altitude snapping right to 0. You can see the yellow line show the true descent, followed by me catching it a bit with manual throttle, then landing.
The question is: WHY did it think the desired altitude should be increasing when throttle input was 0?
View attachment 25609
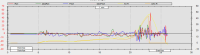
Here you can see motor channels (Chan1, Chan2, Chan3, Chan4, Chan5, Chan6) overlaid with the C3 (Channel 3) RC input, literally my stick input. See the light purple C3 line go to 0, yet the motors were still getting power, and only cut to 0 when I went to Stabilize. In Loiter it should have started a descent at the preset rate, but instead it pushed desired altitude up.
View attachment 25610
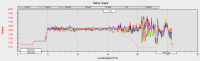
Here is another way to look at it, ThrIn (Throttle Input) with ThrOut (Throttle Output). Throttle input goes to 0 right with my stick input, yet throttle input bounces around 50%.
View attachment 25613
Here is Mission Planner's auto analysis. I will have to check vibration (already using Kyosho Zeal pads), wire tension, and accel calibration. as for the PM "FAIL", Randy from the APM project has said "
The PM failure messages is most likely a red herring. The PM messages display the slow loops after arming because arming ties up the CPU for a couple of seconds. Hopefully we will fix this false-positive for AC3.3." I will have to see if I keep getting it. Other than that this analysis seems OK, right?
View attachment 25612
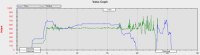
Here is the accel graph in case that is useful. Z seems to be pretty crazy at the 1min mark but I have a feeling that had to do with the wind that day.
View attachment 25614
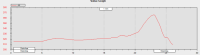
here is another look at altitude. climbing right at the 1min mark, then claiming even more when throttle went to 0. Followed by rapid descent when I switched to Stabilize, followed by my catching it at the last second, then "landing".
View attachment 25611")