Jacob
New Member
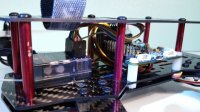
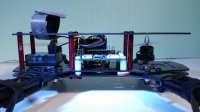
"Few months ago I made the mistake of buying the Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) V2.0 even though I am a newb. My plan was to use it in my first quad (250 size copy of the Blackout Mini H) I flashed the board with multiwii 2.3, fitted it in the quad, wired everything up (correctly) and that's where I'm stuck. I don't know how to configure this board to my quad. I had a kk 2.1 on it first and it worked, I flew the quad, then I replaced it with naze32 and it worked even better but it had no barometer which made the quad akward to fly as I'm used to the DJI phantom. Plus I wanted the GPS functionality!
I didn't wanna buy another FC as I have a limited budget for this and I already have this one, I just cannot work it out.
SO! my question and point of this post is to ask if there is someone willing to quide me step by step how to get this board to work in my quad? I can arm the board and all the channels and motors work. The issues I have now are:
- I don't know how to adjust/lower gyro/acc sensitivity as the quad is extremely twitchy!
-I don't know what PID values to enter for this frame (H frame)
-I don't know what configuration software to use, I only know of 'MultiWiiConfig' which comes with the Multiwii code and looks useless. And the 'MultiwiiGUI' which looks more promising.
And anything else that I might have missed!"
^This was copied from my post on HK Forum and i got no help there so i'm hoping i will have more luck here. I've put quiet abit of money into this (far more then i should have since i have no experience in quads") ) and i don't want it to go to waste and give up on it.
) and i don't want it to go to waste and give up on it.
Since i wrote the original post, i switched off all the sensors in MultiwiiGUI and i only have the board set to arm, when im about to take of the ground the quad wants to spin out violently in either direction, at random.
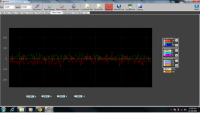
UPDATE: I added a screenshot of the graph readings, all four motors (EMAX mt-1806-2280kv) no props, no bolts, just the motors on full throttle, wondering if the vibrations are too high?
I didn't wanna buy another FC as I have a limited budget for this and I already have this one, I just cannot work it out.
SO! my question and point of this post is to ask if there is someone willing to quide me step by step how to get this board to work in my quad? I can arm the board and all the channels and motors work. The issues I have now are:
- I don't know how to adjust/lower gyro/acc sensitivity as the quad is extremely twitchy!
-I don't know what PID values to enter for this frame (H frame)
-I don't know what configuration software to use, I only know of 'MultiWiiConfig' which comes with the Multiwii code and looks useless. And the 'MultiwiiGUI' which looks more promising.
And anything else that I might have missed!"
^This was copied from my post on HK Forum and i got no help there so i'm hoping i will have more luck here. I've put quiet abit of money into this (far more then i should have since i have no experience in quads
) and i don't want it to go to waste and give up on it.Since i wrote the original post, i switched off all the sensors in MultiwiiGUI and i only have the board set to arm, when im about to take of the ground the quad wants to spin out violently in either direction, at random.
UPDATE: I added a screenshot of the graph readings, all four motors (EMAX mt-1806-2280kv) no props, no bolts, just the motors on full throttle, wondering if the vibrations are too high?
Attachments
-
 20141125_143442.jpg68.6 KB · Views: 216
20141125_143442.jpg68.6 KB · Views: 216 -
 20141125_143519.jpg116 KB · Views: 252
20141125_143519.jpg116 KB · Views: 252 -
 20141125_143554.jpg104.1 KB · Views: 227
20141125_143554.jpg104.1 KB · Views: 227 -
 20141125_143611.jpg87.2 KB · Views: 243
20141125_143611.jpg87.2 KB · Views: 243 -
 20141125_143650.jpg74.7 KB · Views: 237
20141125_143650.jpg74.7 KB · Views: 237 -
 20141125_143719.jpg72.6 KB · Views: 266
20141125_143719.jpg72.6 KB · Views: 266 -
 20141125_144919_1.jpg169.8 KB · Views: 228
20141125_144919_1.jpg169.8 KB · Views: 228 -
 settings.png200.8 KB · Views: 493
settings.png200.8 KB · Views: 493 -
 graph.png155.4 KB · Views: 421
graph.png155.4 KB · Views: 421
Last edited by a moderator: