Bluerex
Member
Merry Christmas Multi-Rotorers,
A few days off work mean I can work on my new DW XM X4 in peace (after the obligatory Boxing Day Sales of course).
Today's subject (and the reason for posting here rather than in the DW forum) is a general one about soldering ESC - Motor connections. I have a bunch of Plush 40A and Axi motors to connect... So;
Bullets are bad - got that.
Solder and heat-shrink is better.
But what about snipping back the ESC's shrink, removing the red output tails and soldering the motor wires directly onto the PCB?
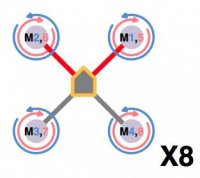
I suspect that the X4 config means that all the motors spin the same direction (inverting gives the effect of revering the direction I think - but don't quote me:tennis") So all the colour codes should be the same onto the ESCs - some large bore clear shrink over the connections should make pre-flight inspection easier.
So all the colour codes should be the same onto the ESCs - some large bore clear shrink over the connections should make pre-flight inspection easier.
Is this a good ideal or more trouble than it's worth?
Charles.
A few days off work mean I can work on my new DW XM X4 in peace (after the obligatory Boxing Day Sales of course).
Today's subject (and the reason for posting here rather than in the DW forum) is a general one about soldering ESC - Motor connections. I have a bunch of Plush 40A and Axi motors to connect... So;
Bullets are bad - got that.
Solder and heat-shrink is better.
But what about snipping back the ESC's shrink, removing the red output tails and soldering the motor wires directly onto the PCB?
I suspect that the X4 config means that all the motors spin the same direction (inverting gives the effect of revering the direction I think - but don't quote me:tennis
So all the colour codes should be the same onto the ESCs - some large bore clear shrink over the connections should make pre-flight inspection easier.Is this a good ideal or more trouble than it's worth?
Charles.