Hallo liebe DJI Gemeinde...
ich habe mich entschlossen, einen Wookong aufzubauen. Es soll natürlich alles perfekt werden.
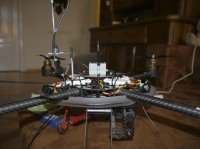
Na Rücksprache mit dem Guru Boris, poste ich hier ein paar Bilder des Aufbaues, in der Hoffnung gleich Fehler beseitigen zu können.
Meine Fragen:
1. Aufbau der Elektronik und deren Vermessung für das DJI Tool.
2. Kalibrieren des Kopters
3. Einbau meiner TF8G Futaba Anlage mit SBUS Receiver
4. Verkabelung des Kopters.
Was seht ihr für generelle Fehler ?!
Danke für eure Mühe...
Marcell
View attachment 3795View attachment 3796View attachment 3797View attachment 3798
ich habe mich entschlossen, einen Wookong aufzubauen. Es soll natürlich alles perfekt werden.
Na Rücksprache mit dem Guru Boris, poste ich hier ein paar Bilder des Aufbaues, in der Hoffnung gleich Fehler beseitigen zu können.
Meine Fragen:
1. Aufbau der Elektronik und deren Vermessung für das DJI Tool.
2. Kalibrieren des Kopters
3. Einbau meiner TF8G Futaba Anlage mit SBUS Receiver
4. Verkabelung des Kopters.
Was seht ihr für generelle Fehler ?!
Danke für eure Mühe...
Marcell
View attachment 3795View attachment 3796View attachment 3797View attachment 3798









")

