Hi,
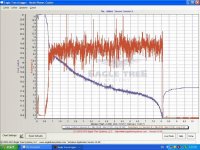
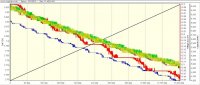
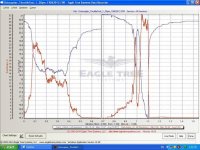
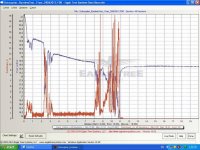
I am one of the people who thought long and hard and then decided it was worth the investment to pay the high price for the Plettenberg motors. After they arrived i saw a number of posts where there had been some extreme failures leading to Octocopter crashes. Fortunately for me the people that got caught and the following discussion provided enough information for me to be fairly cautious about my build. In conjunction i have done a bit of testing to see what currents the motors are using along with battery life that some folk might find useful (discussed in the following posts). Essentially from what i read the people who had trouble were using the MK system and the motors had drawn over 40A which was the boards current limit for each motor leading to failure of the speed controllers.
My build includes CS8 frame and 2-d gimbal, Wookong M controller, Maytech Opto 55A ESC's, Plettenberg 15-22 motors, I used two power distribution boards as i was concerned that the 8 motors might draw more than the 200A limit of an individual board. Connectors are XT60 from the batteries (2 Thunder Power 5S (18.5v) in parallel) but i found that they were getting pretty hot so i exchanged them for XT150 which have resulted in no heat and therefore less loss.
My ESC's are programmed as follows (note if i had my chance again i would probably choose castle creations pheonix 2 (now that they have multirotor firmware as i have used them previously without failure on helicopters - they also log which is nice when you want to know what is happening).
brake off
battery type - NiCad/NiMh
low voltage cut off Threshold - Low
timing - High
Start - start acc
governor - rpm off
cut off power - reduce
motor rotation (fwd/reverse as required)
Switching freq. - 16Hz
More to follow ........
View attachment 4951
Not as elegant as the herc and others but individual ESC's seemed safe for now
I am one of the people who thought long and hard and then decided it was worth the investment to pay the high price for the Plettenberg motors. After they arrived i saw a number of posts where there had been some extreme failures leading to Octocopter crashes. Fortunately for me the people that got caught and the following discussion provided enough information for me to be fairly cautious about my build. In conjunction i have done a bit of testing to see what currents the motors are using along with battery life that some folk might find useful (discussed in the following posts). Essentially from what i read the people who had trouble were using the MK system and the motors had drawn over 40A which was the boards current limit for each motor leading to failure of the speed controllers.
My build includes CS8 frame and 2-d gimbal, Wookong M controller, Maytech Opto 55A ESC's, Plettenberg 15-22 motors, I used two power distribution boards as i was concerned that the 8 motors might draw more than the 200A limit of an individual board. Connectors are XT60 from the batteries (2 Thunder Power 5S (18.5v) in parallel) but i found that they were getting pretty hot so i exchanged them for XT150 which have resulted in no heat and therefore less loss.
My ESC's are programmed as follows (note if i had my chance again i would probably choose castle creations pheonix 2 (now that they have multirotor firmware as i have used them previously without failure on helicopters - they also log which is nice when you want to know what is happening).
brake off
battery type - NiCad/NiMh
low voltage cut off Threshold - Low
timing - High
Start - start acc
governor - rpm off
cut off power - reduce
motor rotation (fwd/reverse as required)
Switching freq. - 16Hz
More to follow ........
View attachment 4951
Not as elegant as the herc and others but individual ESC's seemed safe for now
Attachments

Last edited by a moderator:
") . I was amazed how good the GPS hold was now that i have a working antenna. That said i think my LED light is not working correctly as the colour is purple.
. I was amazed how good the GPS hold was now that i have a working antenna. That said i think my LED light is not working correctly as the colour is purple.