Hey guys, so I just got my x8 build put together and it flies fairly decently now with the default mk settings, but I noticed shorter than expected flight times. I looked at the current draw for the motors and they seem all over the place. The only pattern I see is that all the ccw spinning motors have a higher current draw. Wouldn't that make everything yaw ccw? Does anyone else flying mk coax set ups have any insight into this?
Here are the numbers
Avg. max
Motor 1 5.7 10
Motor 2 5.8 10.7
Motor 3 9.0 13.4
Motor 4 11.1 14.0
Motor 5 11.2 16.6
Motor 6 11.6 16.6
Motor 7 6.9 10.1
Motor 8 7.9 11.3
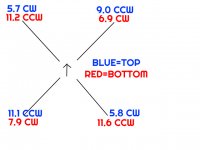
And here they are arranged as they are on the copter, I'm using the x8 setup from the mk wiki: Mikrokopter.de/ucwiki/mkm
Top motors on top
5.7......9.0
11.2....6.9
11.1.....5.8
7.9.......11.6
Here are the numbers
Avg. max
Motor 1 5.7 10
Motor 2 5.8 10.7
Motor 3 9.0 13.4
Motor 4 11.1 14.0
Motor 5 11.2 16.6
Motor 6 11.6 16.6
Motor 7 6.9 10.1
Motor 8 7.9 11.3
And here they are arranged as they are on the copter, I'm using the x8 setup from the mk wiki: Mikrokopter.de/ucwiki/mkm
Top motors on top
5.7......9.0
11.2....6.9
11.1.....5.8
7.9.......11.6