Carcara
Member
The main objective of this project is to build a dual purpose multirotor, able to fly heavy lift payloads for videography and lightweight cameras for aerial mapping.
We want to be able to fly different missions, with minimal part changes. To achieve this we decided to maintain the center frame (flight controller, power distribution board, battery packs) and change booms (with motor and ESCs at the end) when wanted. Open the case, get the center frame, choose booms and fly. This first part of the build consists of the heavy lift configuration, and parts for the long endurance config still need further research to be purchased. This build will have an A2 controller (because we have a spare one at the shop), but later will be changed for a Pixhawk, which is our preferred controller for aerial mapping).
Objectives:
- Small form factor when disassembled for ease of transport
- Quick-release arms
- One carrying case for both multirotor configurations
- Quick release system for different camera gimbals
- Heavy lift payload around 5kg (Red Epic + Light Lenses)
- Light weight payload: Sony A7R
Parts used for HL configuration:
- Cinestar 8 frame X-8 configuration
- Famoushobby 25mm metal boom clamps
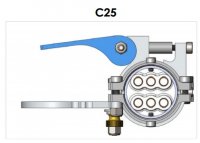
- Catalyst Machineworks 500mm C25 quick release boom system
- Avroto AVL3520/520 motors
- Spyder 60A Opto ESCs
- Foxtech Supreme 1550 props
- DJI A2 Controller (later to be changed to Pixhawk)
- Ronin M Gimbal
- Foxtech FPV D130 dual landing gear
- Powerhungry PHS-10 distribution board
- Tattu 10A 6S battery packs
Parts used for Long Endurance configuration:
- Cinestar 8 frame X-4 configuration
- Catalyst Machineworks C25 quick release boom system
- KDE 7208XF-110 or Tmotor U8 100kv (to be decided)
- KDE Direct XF UAS 75A+ or Foxtech Multi-Pal OPTO 80A HV ESC (to be decided)
- KDE Direct 27.5" x 8.9 or Foxtech Supreme 2880 (to be decided)
- Pixhawk Controller
- Custom built Gimbal (for Sony A7R)
- Tattu 10A 12S battery packs
- Powerhungry PHS-10 distribution board
View attachment 26913
We want to be able to fly different missions, with minimal part changes. To achieve this we decided to maintain the center frame (flight controller, power distribution board, battery packs) and change booms (with motor and ESCs at the end) when wanted. Open the case, get the center frame, choose booms and fly. This first part of the build consists of the heavy lift configuration, and parts for the long endurance config still need further research to be purchased. This build will have an A2 controller (because we have a spare one at the shop), but later will be changed for a Pixhawk, which is our preferred controller for aerial mapping).
Objectives:
- Small form factor when disassembled for ease of transport
- Quick-release arms
- One carrying case for both multirotor configurations
- Quick release system for different camera gimbals
- Heavy lift payload around 5kg (Red Epic + Light Lenses)
- Light weight payload: Sony A7R
Parts used for HL configuration:
- Cinestar 8 frame X-8 configuration
- Famoushobby 25mm metal boom clamps
- Catalyst Machineworks 500mm C25 quick release boom system
- Avroto AVL3520/520 motors
- Spyder 60A Opto ESCs
- Foxtech Supreme 1550 props
- DJI A2 Controller (later to be changed to Pixhawk)
- Ronin M Gimbal
- Foxtech FPV D130 dual landing gear
- Powerhungry PHS-10 distribution board
- Tattu 10A 6S battery packs
Parts used for Long Endurance configuration:
- Cinestar 8 frame X-4 configuration
- Catalyst Machineworks C25 quick release boom system
- KDE 7208XF-110 or Tmotor U8 100kv (to be decided)
- KDE Direct XF UAS 75A+ or Foxtech Multi-Pal OPTO 80A HV ESC (to be decided)
- KDE Direct 27.5" x 8.9 or Foxtech Supreme 2880 (to be decided)
- Pixhawk Controller
- Custom built Gimbal (for Sony A7R)
- Tattu 10A 12S battery packs
- Powerhungry PHS-10 distribution board
View attachment 26913