Webheadfred
Air Traffic Controller
Greetings folks!
Thanks to a lot of bad weather, I was able to finish my X8 build. Here are the specs...
HFP & GPS
40" MTM.
Avroto 2814-11
Turnigy Plush 40a ESC
APC 11x47 props
Carbon fiber arm tubes
Rusty's Frame
Quadframe legs.
2.5kg aprox without gimbal
4s 5000 mah
External Magnotomiter per Hoverfly
Media Tek GPS 2.0 antenna
4.6r3 firmware.
Observations....
First, I set the gains on my T8FG to 60 to begin with as I've used arms this long before. Just a couple of tweaks and I settled on 90 for the gains. It is absolutely the smoothest craft I've flown. Hovers at 40% throttle. Maneuvers with authority.
I dialed out the drift in AL and restarted. Autolevel is very nice. GPS hold is very nice. Much better than the Y6 ever was (more on that later). Took her up a little, about 10m, and engaged AH. I kept my finger in it in case it got squirrly. It descended about a foot and held nice and level. I was really pleased with this as I never could get the Y6 to hold well.
I didn't try RTH as I was pressing against darkness but will do more tests tomorrow. As I maneuvered to land, it was so very smooth that it landed and touched like a feather. No bump. No constant adjustment. No fighting the thing to get it on the ground. All much better than expected.
Here's what I think...
The biggest difference are the new motors. Compared to the RCTimer BC3536-11, these Avroto 2814-11 are night and day. As I was building, I tested each arm for vibration. At full RPM, the vibration was nearly imperceptible at the other end of the boom. Each motor was this good. I think all my previous issues were the bad motors causing vibration, affecting the HFP sensors. As well, the variance of the RCTimers were huge. A few were just ok and the rest were crap. I didn't fully realize this until I got the new motors. I mean NIGHT AND DAY!
I opted for the 11x47 props to get faster motor response when the HFP needed it. I normally use a slightly bigger prop on the bottom as it gets better efficiency. I may try a 12x38 on the bottoms. Not until I get the camera on the new gimbal though and see how she looks.
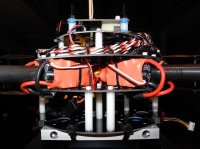
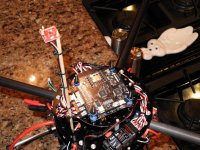
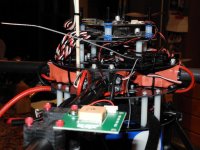
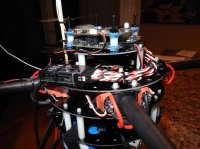
I did do something different and I may regret it. I put the ESC's completely in the body adjacent to the arms. I intentionally over sized the amperage so they wouldn't run so hot as there won't be as much air flow. I felt them after the flight and they were barely warm. Also, I used a combination of crimps, solder, crimps with solder, to determine if one was better of if one would fail before the other. By far, it's faster and easier to use crimps. I kinda modified a few of them to get a smaller joint as it was getting tight inside the body. We'll see. I also soldered all the motor connections in the frame. To replace a motor or ESC would require a complete disassembly of the X8. Probably not too smart on my end but I'm stuck with it now. I also placed the ESC's on their sides as this was the only way they'd fit. This required a spacer between the arm mounts and the body plates to allow them to fit like this. I also added for good measure, a rubber spacer hopefully to reduce vibrations. With the new motors, I doubt I'll need them but they're there now.
I can honestly say that this build does everything Hoverfly says it should. It flew so incredibly easy, that it nearly brought tears to my eyes. I love big multi's as they're so stable. Tomorrow I'll do more testing and hopefully take a video of her flying. I've included a few pictures. If I can help anyone from my build, let me know.
Thanks to a lot of bad weather, I was able to finish my X8 build. Here are the specs...
HFP & GPS
40" MTM.
Avroto 2814-11
Turnigy Plush 40a ESC
APC 11x47 props
Carbon fiber arm tubes
Rusty's Frame
Quadframe legs.
2.5kg aprox without gimbal
4s 5000 mah
External Magnotomiter per Hoverfly
Media Tek GPS 2.0 antenna
4.6r3 firmware.
Observations....
First, I set the gains on my T8FG to 60 to begin with as I've used arms this long before. Just a couple of tweaks and I settled on 90 for the gains. It is absolutely the smoothest craft I've flown. Hovers at 40% throttle. Maneuvers with authority.
I dialed out the drift in AL and restarted. Autolevel is very nice. GPS hold is very nice. Much better than the Y6 ever was (more on that later). Took her up a little, about 10m, and engaged AH. I kept my finger in it in case it got squirrly. It descended about a foot and held nice and level. I was really pleased with this as I never could get the Y6 to hold well.
I didn't try RTH as I was pressing against darkness but will do more tests tomorrow. As I maneuvered to land, it was so very smooth that it landed and touched like a feather. No bump. No constant adjustment. No fighting the thing to get it on the ground. All much better than expected.
Here's what I think...
The biggest difference are the new motors. Compared to the RCTimer BC3536-11, these Avroto 2814-11 are night and day. As I was building, I tested each arm for vibration. At full RPM, the vibration was nearly imperceptible at the other end of the boom. Each motor was this good. I think all my previous issues were the bad motors causing vibration, affecting the HFP sensors. As well, the variance of the RCTimers were huge. A few were just ok and the rest were crap. I didn't fully realize this until I got the new motors. I mean NIGHT AND DAY!
I opted for the 11x47 props to get faster motor response when the HFP needed it. I normally use a slightly bigger prop on the bottom as it gets better efficiency. I may try a 12x38 on the bottoms. Not until I get the camera on the new gimbal though and see how she looks.
I did do something different and I may regret it. I put the ESC's completely in the body adjacent to the arms. I intentionally over sized the amperage so they wouldn't run so hot as there won't be as much air flow. I felt them after the flight and they were barely warm. Also, I used a combination of crimps, solder, crimps with solder, to determine if one was better of if one would fail before the other. By far, it's faster and easier to use crimps. I kinda modified a few of them to get a smaller joint as it was getting tight inside the body. We'll see. I also soldered all the motor connections in the frame. To replace a motor or ESC would require a complete disassembly of the X8. Probably not too smart on my end but I'm stuck with it now. I also placed the ESC's on their sides as this was the only way they'd fit. This required a spacer between the arm mounts and the body plates to allow them to fit like this. I also added for good measure, a rubber spacer hopefully to reduce vibrations. With the new motors, I doubt I'll need them but they're there now.
I can honestly say that this build does everything Hoverfly says it should. It flew so incredibly easy, that it nearly brought tears to my eyes. I love big multi's as they're so stable. Tomorrow I'll do more testing and hopefully take a video of her flying. I've included a few pictures. If I can help anyone from my build, let me know.





")