- Wait for a calm day and go to a large open area.
- Ensure the ch7 or ch8 switch is in the LOW position.
- Take off and put the copter into AltHold mode at a comfortable altitude.
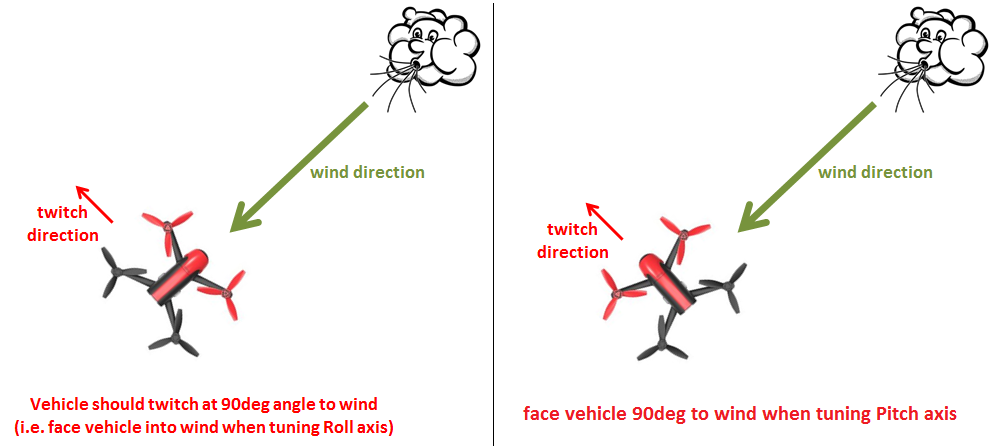
- Face the vehicle so that it will twitch at 90degrees from the direction the wind is blowing (i.e. if tuning Roll first, point the vehicle into the wind)
- Set the ch7/ch8 switch to the HIGH position to engage auto tuning:
- You will see it twitch about 20 degrees left and right for a few minutes, then it will repeat forward and back.
- Use the roll and pitch stick at any time to reposition the copter if it drifts away (it will use the original PID gains during repositioning and between tests). When you release the sticks it will continue auto tuning where it left off.
- Move the ch7/ch8 switch into the LOW position at any time to abandon the autotuning and return to the origin PIDs.
- Make sure that you do not have any trim set on your transmitter or the autotune may not get the signal that the sticks are centered.
- When the tune completes the copter will change back to the original PID gains.
- Put the ch7/ch8 switch into the LOW position then back to the HIGH position to test the tuned PID gains.
- Put the ch7/ch8 switch into the LOW position to fly using the original PID gains.
- If you are happy with the autotuned PID gains, leave the ch7/ch8 switch in the HIGH position, land and disarm to save the PIDs permanently.
If you DO NOT like the new PIDS, switch ch7/ch8 LOW to return to the original PIDs. The gains will not be saved when you disarm.
If you find after performing an AutoTune that the vehicle feels overly twitchy when flying Stabilize, AltHold or PosHold (but ok in more autonomous modes like Loiter, RTL, Auto) try reducing the RC_FEEL parameter to 0.25. This smooths out the pilot’s input.