Efliernz
Pete
My diy small balsa/fibreglass Y6 was good but I wanted something bigger that would handle the wind.
I needed to carry a brushless gimbal/Gopro2 or my Panny LX3 for stills.
It needed to fold for travelling.
Run on 4S5000 packs as that is what I use on my Droidworx VM6
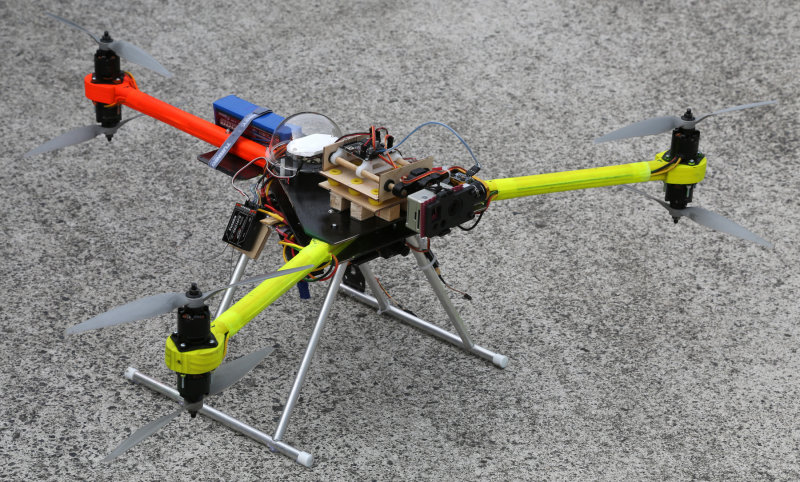
I should be more visible / greater presence than the DW hexa. Orientation is difficult with the flat hexa - even with lights.
It will use the same motors as the DW - Sunnysky 2814/11 700Kv with 12x6 APC narrow-blade clones.
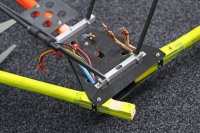
20 minutes on the PC using Visio, I had a plan! 20 minutes more and I had 3mm plywood cut with countersunk washers for bolt "hard-points"
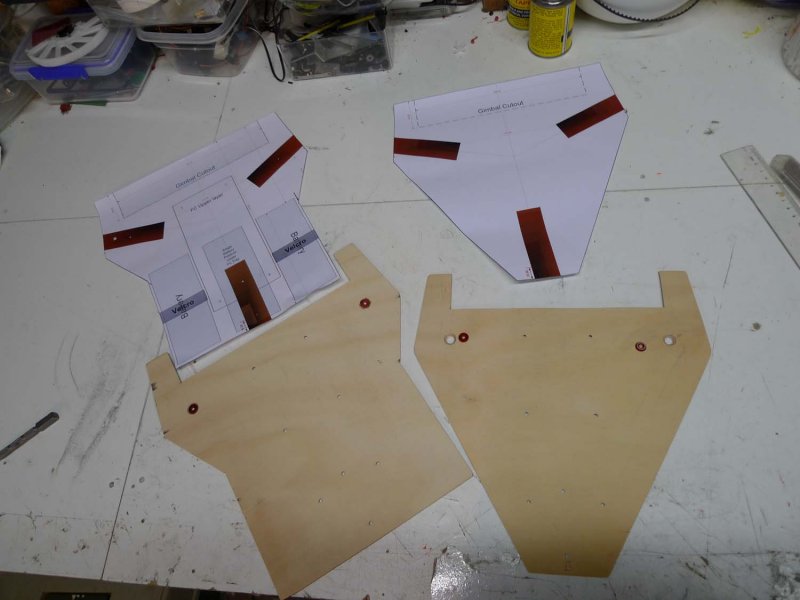
2 layers of fibreglass top and bottom at 45-deg bias...

Press the fg and resin between two sheets of hardened glass (unused bathroom shelves)

Add some weight... just a little")

Trim the excess glass... looking good!
The arms are 24mm square pine. I routered slots each side for the wiring to be (almost) hidden, before throwing them in a lathe... because round looks better than square

Epoxy-glue the rest of the motor mount and clamp.

Shape the mounts and drill out for silicon fuel tubing (for anti-vibration) that the motor bolts will go through

Motors... and through-bolts

I spent 90 minutes fabricating the u/c from 12.7mm (1/2") thin wall aluminium. While it weighs around 200g, it provides strength and stability even if you are moving forward at touch down... where as the DW one would pop carbon tube inserts. I often fly off uneven / long grass areas so it is perfect

I bought the Quarternium brushless gimbal for my Gopro. I had tried several different ways to mount it - all were rubbish until this one. It uses 200g-spec'd anti-vibe spacers from Hobbyking and more 3mm plywood. It simply works...
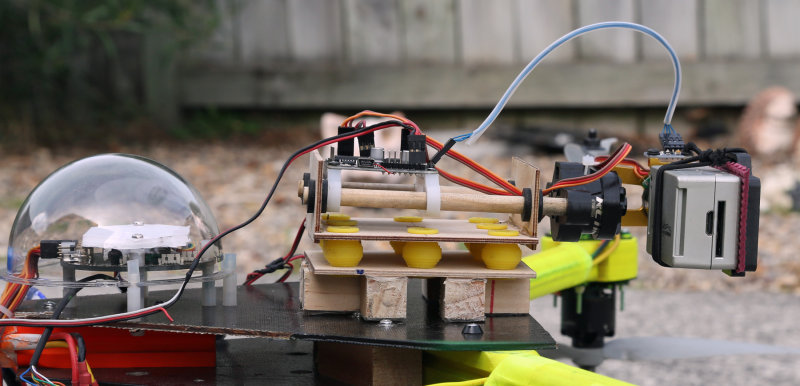
I am using a 12 month old Multiwii Paris v4r6 controller and it flies like a dream! ESC's are 30A "Afro"s and being hi-frequency esc's, it is much quieter than my DW VM6.
Here is a run-down video of the making as well as the first proper flight test.
Pete
I needed to carry a brushless gimbal/Gopro2 or my Panny LX3 for stills.
It needed to fold for travelling.
Run on 4S5000 packs as that is what I use on my Droidworx VM6
I should be more visible / greater presence than the DW hexa. Orientation is difficult with the flat hexa - even with lights.
It will use the same motors as the DW - Sunnysky 2814/11 700Kv with 12x6 APC narrow-blade clones.
20 minutes on the PC using Visio, I had a plan! 20 minutes more and I had 3mm plywood cut with countersunk washers for bolt "hard-points"
2 layers of fibreglass top and bottom at 45-deg bias...
Press the fg and resin between two sheets of hardened glass (unused bathroom shelves)
Add some weight... just a little
Trim the excess glass... looking good!
The arms are 24mm square pine. I routered slots each side for the wiring to be (almost) hidden, before throwing them in a lathe... because round looks better than square
Epoxy-glue the rest of the motor mount and clamp.
Shape the mounts and drill out for silicon fuel tubing (for anti-vibration) that the motor bolts will go through
Motors... and through-bolts
I spent 90 minutes fabricating the u/c from 12.7mm (1/2") thin wall aluminium. While it weighs around 200g, it provides strength and stability even if you are moving forward at touch down... where as the DW one would pop carbon tube inserts. I often fly off uneven / long grass areas so it is perfect
I bought the Quarternium brushless gimbal for my Gopro. I had tried several different ways to mount it - all were rubbish until this one. It uses 200g-spec'd anti-vibe spacers from Hobbyking and more 3mm plywood. It simply works...
I am using a 12 month old Multiwii Paris v4r6 controller and it flies like a dream! ESC's are 30A "Afro"s and being hi-frequency esc's, it is much quieter than my DW VM6.
Here is a run-down video of the making as well as the first proper flight test.
Pete
Last edited by a moderator: