fahrvergnuugen
New Member
So I just built my first quad rotor and took it on it's maiden voyage yesterday. The good news is that it flies! The bad news is that I can't seem to get return to home to work.
Everything else seems to be working the way it's supposed to. In GPS mode it holds position as expected and in atti. mode it drifts. When I flip the switch on my TX to trigger failsafe, the naza immediately lowers the throttle and the quadrotor descends straight down instead of ascending to 20m and then flying home.
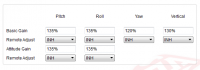
The settings in the naza software are set to Go-Home & Landing:
View attachment 11945
I have also verified in the naza software that my 3 position switch is triggering failsafe mode on channel U. When I flip the failsafe switch while flying, the naza stops responding to input from the TX and takes over. If I turn fail safe off, I can regain control.
On startup I let it sit for about 60 seconds until the LED flashes green a bunch of times, so I think it has GPS signal. I also flew it more than 10M away from home position per the instructions before triggering failsafe. I haven't adjusted any gains or anything yet (though I'm not sure that would have any effect on autopilot?)
What could be wrong? Thanks in advance!
Everything else seems to be working the way it's supposed to. In GPS mode it holds position as expected and in atti. mode it drifts. When I flip the switch on my TX to trigger failsafe, the naza immediately lowers the throttle and the quadrotor descends straight down instead of ascending to 20m and then flying home.
The settings in the naza software are set to Go-Home & Landing:
View attachment 11945
I have also verified in the naza software that my 3 position switch is triggering failsafe mode on channel U. When I flip the failsafe switch while flying, the naza stops responding to input from the TX and takes over. If I turn fail safe off, I can regain control.
On startup I let it sit for about 60 seconds until the LED flashes green a bunch of times, so I think it has GPS signal. I also flew it more than 10M away from home position per the instructions before triggering failsafe. I haven't adjusted any gains or anything yet (though I'm not sure that would have any effect on autopilot?)
What could be wrong? Thanks in advance!