The other night I went to bed safe in the knowledge that packing teams in Germany, China and America had sprung into life, hurriedly shipping what will soon be my first real world experience with UAV technology.
Just few days later a small package with Chinese airmail written on the side arrived at my door...
The project overview
After reading, lurking and learning on forums such as this one for the past year and a half, this is my first foray into the real world of autonomy so I am trying to take all the precautions.
My main goal for starting this thread series is to get feedback from the community about my designs and methods of construction, so please fire away!
The design itself is a carbon fiber folding quadcopter that is able to lift a camera (perhaps more than a GoPro) and get good flight times while being armed with the functionality of the Pixhawk from 3DRobotics.
Of the parts listed above, those in bold I have received.
My solution was to drill an extra two 25mm holes into the carbon plates and mount the motors on locking washers:
View attachment 16675
After assembling all of the motor arms I assembled the frame, being careful to make sure everything is in place and thread-locked
View attachment 16676
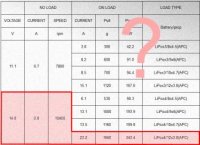
As you can see in the chart below the 2814 HP motors weight in at 100g each and consume 23A to lift 1660g each.
View attachment 16677View attachment 16677
My 4 in 1 ESC can only handle 30A for 10 second bursts and runs at 25 amps for continuous power.
Doing some rough calculations:
1660g x 4 equals 6640. Dividing that in half gives 3320g maximum weight for my quad.
Do you guys think this is cutting it a bit fine (risky)?
The hobby-wing ESC does have some interesting protection features, most notably...
Other than that there have been a few anomalies with regard to the frame itself (namely one of the screw holes being a 3mm as opposed to 2.5mm), but they were minor issues and I am very impressed with the quality of the equipment so far!
Well, I'm off to replace the battery connector with some XT60's!
Part two will be posted when "goodluckbuy" parts arrive!
Jethro.
Just few days later a small package with Chinese airmail written on the side arrived at my door...
The project overview
My main goal for starting this thread series is to get feedback from the community about my designs and methods of construction, so please fire away!
The design itself is a carbon fiber folding quadcopter that is able to lift a camera (perhaps more than a GoPro) and get good flight times while being armed with the functionality of the Pixhawk from 3DRobotics.
Parts list:
- Pixhawk Autopilot and GPS
- X650 Carbon fiber frame from RCTimer
- Four 2814 710kr/V High Performance motors with 12" Carbon Fiber Props
- Hobbywing 25A 4 in 1 ESC
- Turnigy 9XR transmitter with the FrSky DJT module in the back
- D4R-II Receiver
- Turnigy Nanotech 4000mah 4S Battery
- Chargers and other accessories...
- Hand drill
- Weller TCP soldering iron and accessories
- Glue gun
- Threadlock
- Superglue
- Heatshrink
- Drivers and Pliers
Of the parts listed above, those in bold I have received.
Issues
The first problem that I encountered was that the motors I had ordered did not fit my motor mounts. (motors had holes of 25 and 19mm, the mount had 16 and 19mm).
My solution was to drill an extra two 25mm holes into the carbon plates and mount the motors on locking washers:
View attachment 16675
After assembling all of the motor arms I assembled the frame, being careful to make sure everything is in place and thread-locked
Results:
The final result felt sturdy...
View attachment 16676
Main Concerns:
My main concern so far is regarding my choice of Motor and ESC.
As you can see in the chart below the 2814 HP motors weight in at 100g each and consume 23A to lift 1660g each.
View attachment 16677View attachment 16677
My 4 in 1 ESC can only handle 30A for 10 second bursts and runs at 25 amps for continuous power.
Doing some rough calculations:
1660g x 4 equals 6640. Dividing that in half gives 3320g maximum weight for my quad.
Do you guys think this is cutting it a bit fine (risky)?
The hobby-wing ESC does have some interesting protection features, most notably...
...2.8 Full protection: Low voltage cutoff protection / Over-heat protection / Throttle signal loss protection.
Another minor concern is that I could only find 'purple' threadlock' in my local hardware shop... specified for threads that are 1-5mm. So it should be ok...
Other than that there have been a few anomalies with regard to the frame itself (namely one of the screw holes being a 3mm as opposed to 2.5mm), but they were minor issues and I am very impressed with the quality of the equipment so far!
Well, I'm off to replace the battery connector with some XT60's!
Part two will be posted when "goodluckbuy" parts arrive!
Jethro.