J3Cub
Member
Hello and welcome to my review of the Ardupilot Mega 2.5 and Hexacrafter HC-650 hexacopter frame!
I would like to give a big thanks to Bart for giving me the opportunity to do this review for MultiRotorForums, 3D Robotics for the Ardupilot Mega 2.5 and Hexacrafter for the HC-650 frame.
The Ardupilot Mega 2.5 is a fully open source flight controller and autopilot system. Its features go far beyond that of basic radio controlled multicopters on the market today. The Apm2.5 offers position hold,fully autonomous flight, including waypoints, mission planning and telemetry with the use of GPS and independent telemetry radios.
Being an open source flight controller, the Apm2.5 doesn’t come with a typical instruction manual. The Arducopter Wiki is used as a guide and a tool for setup and tuning of the Apm2.5. This page will be cited throughout the review. http://code.google.com/p/arducopter/wiki/ArduCopter
The Apm2.5 is a very affordable option considering its extensive autonomous functions. It can be purchased here at 3D Robotics. http://store.3drobotics.com/products/apm-2-5-kit
The Apm2.5 comes in a relatively small box. (seen on the left)
View attachment 11681
All of the components come neatly wrapped within the foam peanut filled box.
View attachment 11682View attachment 11683
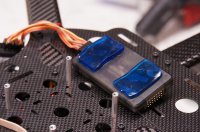
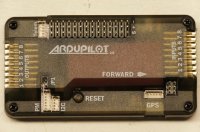
I am very impressed by the controller so far! The plastic case looks very nice and provides labels for each port. It feels solid and should do a good job of protecting the internal electronics.
View attachment 11685View attachment 11684View attachment 11686
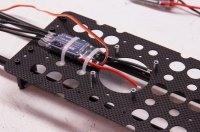
The Apm2.5 comes with a module that supplies power to the board. This ensures steady power along with adding the benefit of current and voltage telemetry (if telemetry radios are used).
View attachment 11689View attachment 11690
If the power module is being used inplace of power from the esc’s, this included jumper must be installed.
View attachment 11687
A usb cable is provided to connect the Apm2.5 to the mission planner, once installed on your computer. (left) The second usb cable is used to connect the 3DR telemetry receiver to your computer.(right)
View attachment 11688
These cables are used to connect the telemetry transmitter to the Apm2.5.
View attachment 11691
Pictured are the two, 915mhz telemetry radios along side the uBlox (upgraded) gps. The two telemetry radios are nicely protected by a plastic sleeve.
View attachment 11692View attachment 11694View attachment 11695View attachment 11696View attachment 11697View attachment 11698
Two standard whip antennas are included. Nice and compact!
View attachment 11693View attachment 11699
I would like to give a big thanks to Bart for giving me the opportunity to do this review for MultiRotorForums, 3D Robotics for the Ardupilot Mega 2.5 and Hexacrafter for the HC-650 frame.
The Ardupilot Mega 2.5 is a fully open source flight controller and autopilot system. Its features go far beyond that of basic radio controlled multicopters on the market today. The Apm2.5 offers position hold,fully autonomous flight, including waypoints, mission planning and telemetry with the use of GPS and independent telemetry radios.
Being an open source flight controller, the Apm2.5 doesn’t come with a typical instruction manual. The Arducopter Wiki is used as a guide and a tool for setup and tuning of the Apm2.5. This page will be cited throughout the review. http://code.google.com/p/arducopter/wiki/ArduCopter
The Apm2.5 is a very affordable option considering its extensive autonomous functions. It can be purchased here at 3D Robotics. http://store.3drobotics.com/products/apm-2-5-kit
The Apm2.5 comes in a relatively small box. (seen on the left)
View attachment 11681
All of the components come neatly wrapped within the foam peanut filled box.
View attachment 11682View attachment 11683
I am very impressed by the controller so far! The plastic case looks very nice and provides labels for each port. It feels solid and should do a good job of protecting the internal electronics.
View attachment 11685View attachment 11684View attachment 11686
The Apm2.5 comes with a module that supplies power to the board. This ensures steady power along with adding the benefit of current and voltage telemetry (if telemetry radios are used).
View attachment 11689View attachment 11690
If the power module is being used inplace of power from the esc’s, this included jumper must be installed.
View attachment 11687
A usb cable is provided to connect the Apm2.5 to the mission planner, once installed on your computer. (left) The second usb cable is used to connect the 3DR telemetry receiver to your computer.(right)
View attachment 11688
These cables are used to connect the telemetry transmitter to the Apm2.5.
View attachment 11691
Pictured are the two, 915mhz telemetry radios along side the uBlox (upgraded) gps. The two telemetry radios are nicely protected by a plastic sleeve.
View attachment 11692View attachment 11694View attachment 11695View attachment 11696View attachment 11697View attachment 11698
Two standard whip antennas are included. Nice and compact!
View attachment 11693View attachment 11699
Attachments
-
 DSC01535.jpg142.4 KB · Views: 686
DSC01535.jpg142.4 KB · Views: 686 -
 DSC01537.jpg139.1 KB · Views: 582
DSC01537.jpg139.1 KB · Views: 582 -
 DSC01542.jpg139.5 KB · Views: 567
DSC01542.jpg139.5 KB · Views: 567 -
 DSC01548.jpg127.9 KB · Views: 730
DSC01548.jpg127.9 KB · Views: 730 -
 DSC01551.jpg147.6 KB · Views: 739
DSC01551.jpg147.6 KB · Views: 739 -
 DSC01554.jpg142.6 KB · Views: 679
DSC01554.jpg142.6 KB · Views: 679 -
 DSC01556.jpg135.2 KB · Views: 566
DSC01556.jpg135.2 KB · Views: 566 -
 DSC01562.jpg131.4 KB · Views: 569
DSC01562.jpg131.4 KB · Views: 569 -
 DSC01576.jpg135.2 KB · Views: 572
DSC01576.jpg135.2 KB · Views: 572 -
 DSC01585.jpg136.6 KB · Views: 554
DSC01585.jpg136.6 KB · Views: 554 -
 DSC01592.jpg133.1 KB · Views: 553
DSC01592.jpg133.1 KB · Views: 553 -
 DSC01597.jpg129.1 KB · Views: 543
DSC01597.jpg129.1 KB · Views: 543 -
 DSC01600.jpg131.2 KB · Views: 566
DSC01600.jpg131.2 KB · Views: 566 -
 DSC01602.jpg133.9 KB · Views: 565
DSC01602.jpg133.9 KB · Views: 565 -
 DSC01607.jpg127.2 KB · Views: 571
DSC01607.jpg127.2 KB · Views: 571 -
 DSC01614.jpg125.9 KB · Views: 538
DSC01614.jpg125.9 KB · Views: 538 -
 DSC01620.jpg125 KB · Views: 520
DSC01620.jpg125 KB · Views: 520 -
 DSC01627.jpg137.9 KB · Views: 559
DSC01627.jpg137.9 KB · Views: 559 -
 DSC01636.jpg126.9 KB · Views: 568
DSC01636.jpg126.9 KB · Views: 568
Last edited by a moderator: