ZANE
Member
Evening all...
Not sure if this is the right section for this, but here it goes.
I have the following setup:
Alien 560 frame
Naza M Lite
TURNIGY Plush 30amp ESC's
Turnigy NTM Prop Drive 28-30S 800KV / 300W Motors
Turnigy TGY-i6 AFHDS Transmitter and 6CH Receiver
Heres what I have done.
Everything is installed (naza unit)
All ESC's are calibrated and all motors spin up at the same time.
I have set up the Naza as per the instruction (told it that I have a quadcopter)
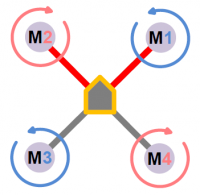
All the motors spin in the motors spin in the correct orientation.
All the props ar on the correct way (clock wise, counter clockwise) and on the correct motors.
I've done the compass calibration (naza dance)
I have the unit in GPS mode (I've also done Altitude & Manual mode) with all the satellites present.
Now here's what's going wrong....
When I go to launch the quad keeps flipping over? and this is when its sat on the ground?
I arm the motors and they all spin at the same time and at what seems to be the same speed.
I then apply a little throttle. You can visible see the aircraft create lift.
Then apply a little more throttle and the back of the craft flips over the front.
I have tried arming then applying a continual amount of throttle... same thing happens.
I even tried arming then applying 3/4 throttle... the same thing happens and screw up a set of props?
PLLLLLEEEASSSE can some one advise whats going on.
Cheers
Zane
Not sure if this is the right section for this, but here it goes.
I have the following setup:
Alien 560 frame
Naza M Lite
TURNIGY Plush 30amp ESC's
Turnigy NTM Prop Drive 28-30S 800KV / 300W Motors
Turnigy TGY-i6 AFHDS Transmitter and 6CH Receiver
Heres what I have done.
Everything is installed (naza unit)
All ESC's are calibrated and all motors spin up at the same time.
I have set up the Naza as per the instruction (told it that I have a quadcopter)
All the motors spin in the motors spin in the correct orientation.
All the props ar on the correct way (clock wise, counter clockwise) and on the correct motors.
I've done the compass calibration (naza dance)
I have the unit in GPS mode (I've also done Altitude & Manual mode) with all the satellites present.
Now here's what's going wrong....
When I go to launch the quad keeps flipping over? and this is when its sat on the ground?
I arm the motors and they all spin at the same time and at what seems to be the same speed.
I then apply a little throttle. You can visible see the aircraft create lift.
Then apply a little more throttle and the back of the craft flips over the front.
I have tried arming then applying a continual amount of throttle... same thing happens.
I even tried arming then applying 3/4 throttle... the same thing happens and screw up a set of props?
PLLLLLEEEASSSE can some one advise whats going on.
Cheers
Zane