Old-sir-hippy
Member
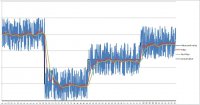
The Kalman filter seems rather complex to implement and needs floating point maths. I would like to use integer maths, so I have been testing a 2 pass filter based on what I think is the 1D Kalman filter, however I am not sure of the response time required. The version I have effectively acts as a low pass filter and I run the simulated gyro data through two filters so there are noticeable delays in underlying real data changes, but I am not sure whether this matters.
How quickly do Kalman filters react to changes in the real underlying data? (rather than noise which they should eliminate)
The 1D formula I am experimenting with is:
(new value*K)+(1-K)*previous value
I do this twice and for the excel model simulation can change the value of K for each pass.
A good value seems to be K=0.07.
Would this work?
The attached JPEG shows the calculations in action, the noise level is taken from a french paper -
Modélisation et interface de contrôle d'un quadri-rotor
Rapport de projet
Pierre Beugnet
Raphaël Polonowski
Nik Khairail Afzan Nik Mohamed
www.beugnet.fr/projets/fichiers/rapportquadri.pdf View attachment 356
How quickly do Kalman filters react to changes in the real underlying data? (rather than noise which they should eliminate)
The 1D formula I am experimenting with is:
(new value*K)+(1-K)*previous value
I do this twice and for the excel model simulation can change the value of K for each pass.
A good value seems to be K=0.07.
Would this work?
The attached JPEG shows the calculations in action, the noise level is taken from a french paper -
Modélisation et interface de contrôle d'un quadri-rotor
Rapport de projet
Pierre Beugnet
Raphaël Polonowski
Nik Khairail Afzan Nik Mohamed
www.beugnet.fr/projets/fichiers/rapportquadri.pdf View attachment 356
")