Cheshirecat
Member
Hi
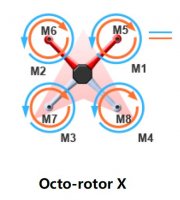
I currently run my SJ X8 with the standard WKM configuration View attachment 16138
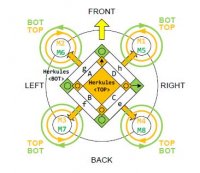
So all top motors run CW and all lower motors run CCW, But i would like to switch it so it runs like 2 stacked quads so alternate motors turn CW then CCW on the top and the same on the bottom as per this diagram.
View attachment 16139
So after programming the Herkules for the correct motor layout i then select the Octo Rotor X option in the WKM Assistant and then hit advanced and enter the following in the custom mixer table.
View attachment 16140
When i use the motor test tool in the MOTOR TEST TOOL M1-M6 all spin OK in the correct sequence but i get nothing at all for M7 - M8 (i am not using F1 Or F2) for anything other than motor control as the gimbal is on a separate RX.
Is it also correct that the WKM software has no apparent button to click that is labeled reassuringly along the lines of OK or Commit when you enter a custom mix and that going back to view it just displays a table full of Zeros (am i actually resetting it by going back to view it) if i hit defaults and go back to select the standard Octo - Rotor X setup all 8 run again regardless of the flash settings in the Herkules.
Am i missing something? making no other changes!! any guidance would be appreciated.
I currently run my SJ X8 with the standard WKM configuration View attachment 16138
So all top motors run CW and all lower motors run CCW, But i would like to switch it so it runs like 2 stacked quads so alternate motors turn CW then CCW on the top and the same on the bottom as per this diagram.
View attachment 16139
So after programming the Herkules for the correct motor layout i then select the Octo Rotor X option in the WKM Assistant and then hit advanced and enter the following in the custom mixer table.
View attachment 16140
When i use the motor test tool in the MOTOR TEST TOOL M1-M6 all spin OK in the correct sequence but i get nothing at all for M7 - M8 (i am not using F1 Or F2) for anything other than motor control as the gimbal is on a separate RX.
Is it also correct that the WKM software has no apparent button to click that is labeled reassuringly along the lines of OK or Commit when you enter a custom mix and that going back to view it just displays a table full of Zeros (am i actually resetting it by going back to view it) if i hit defaults and go back to select the standard Octo - Rotor X setup all 8 run again regardless of the flash settings in the Herkules.
Am i missing something? making no other changes!! any guidance would be appreciated.